#include <costmap_converter/costmap_to_dynamic_obstacles/multitarget_tracker/Kalman.h>#include "opencv2/opencv.hpp"#include <iostream>#include <vector>
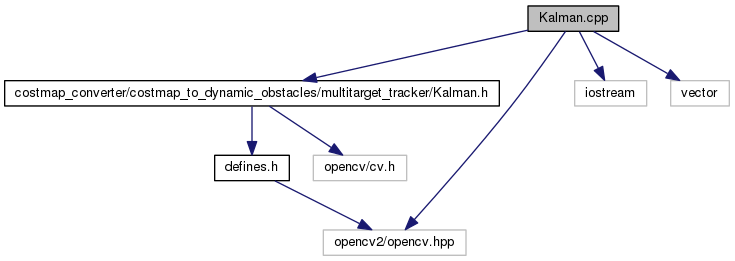
Include dependency graph for Kalman.cpp:
#include <costmap_converter/costmap_to_dynamic_obstacles/multitarget_tracker/Kalman.h>#include "opencv2/opencv.hpp"#include <iostream>#include <vector>