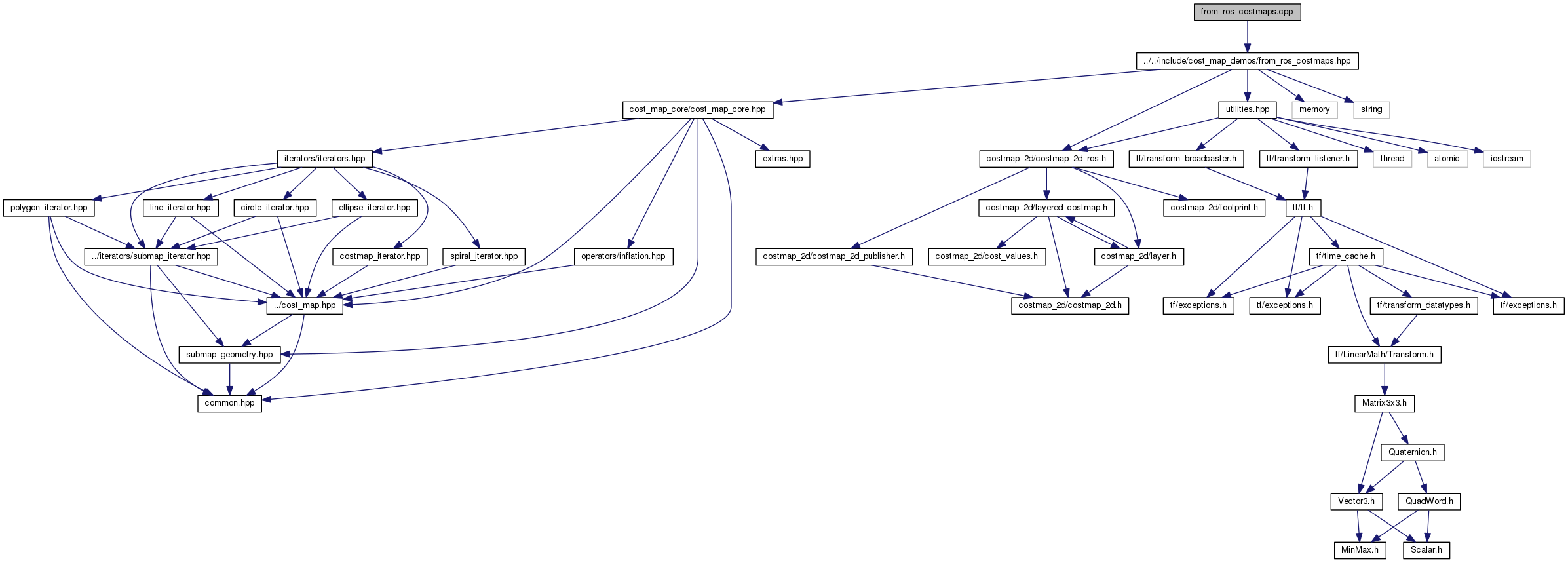
Include dependency graph for lib/from_ros_costmaps.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | cost_map_demos |
Functions | |
| void | cost_map_demos::broadcastCostmap2DROSTestSuiteTransforms (TransformBroadcaster &broadcaster) |
Detailed Description
Definition in file lib/from_ros_costmaps.cpp.