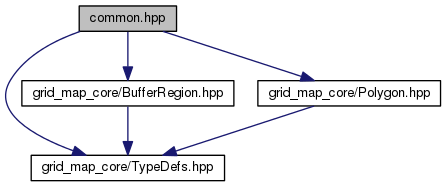
#include <grid_map_core/TypeDefs.hpp>#include <grid_map_core/BufferRegion.hpp>#include <grid_map_core/Polygon.hpp>
Include dependency graph for common.hpp:
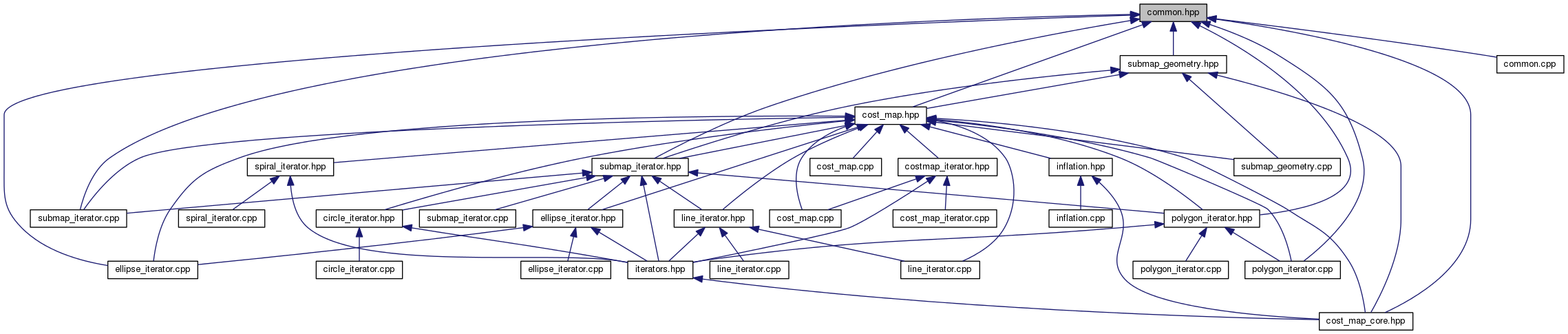
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | cost_map |
Typedefs | |
| typedef grid_map::BufferRegion | cost_map::BufferRegion |
| typedef grid_map::Matrix | cost_map::DataMatrix |
| typedef Matrix::Scalar | cost_map::DataType |
| typedef grid_map::Index | cost_map::Index |
| typedef grid_map::Length | cost_map::Length |
| typedef Eigen::Matrix < unsigned char, Eigen::Dynamic, Eigen::Dynamic > | cost_map::Matrix |
| typedef grid_map::Polygon | cost_map::Polygon |
| typedef grid_map::Position | cost_map::Position |
| typedef grid_map::Position3 | cost_map::Position3 |
| typedef grid_map::Size | cost_map::Size |
| typedef grid_map::Time | cost_map::Time |
| typedef grid_map::Vector | cost_map::Vector |
| typedef grid_map::Vector3 | cost_map::Vector3 |
Variables | |
| const unsigned char | cost_map::FREE_SPACE = 0 |
| const unsigned char | cost_map::INSCRIBED_OBSTACLE = 253 |
| const unsigned char | cost_map::LETHAL_OBSTACLE = 254 |
| const unsigned char | cost_map::NO_INFORMATION = 255 |
Detailed Description
Definition in file common.hpp.