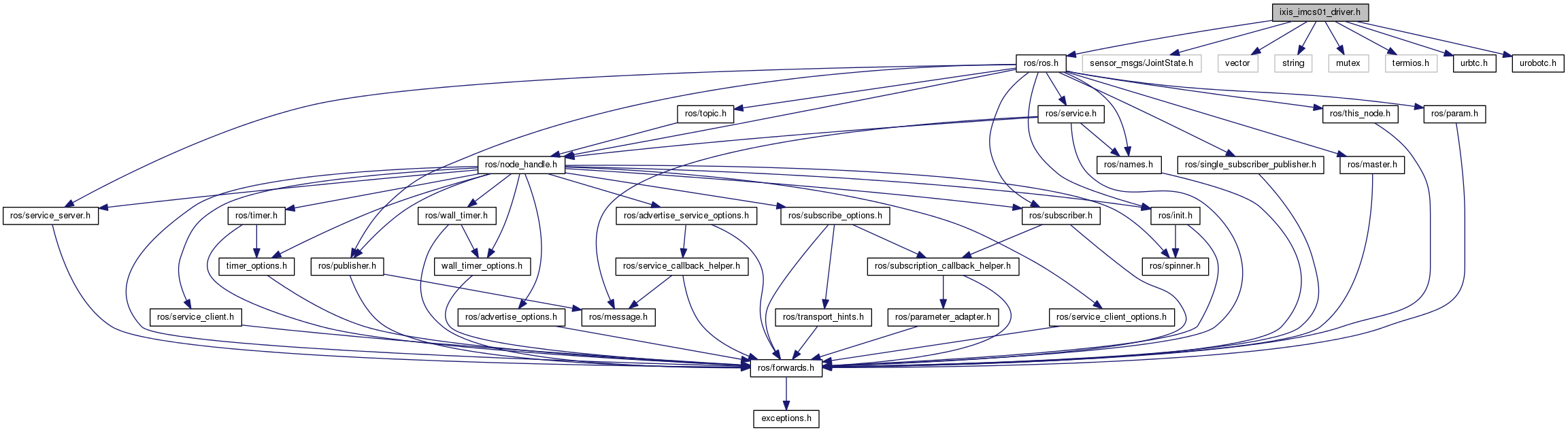
#include <ros/ros.h>#include <sensor_msgs/JointState.h>#include <vector>#include <string>#include <mutex>#include <termios.h>#include "urbtc.h"#include "urobotc.h"
Include dependency graph for ixis_imcs01_driver.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | IxisImcs01Driver |
Defines | |
| #define | JOINT_INDEX_FRONT 2 |
| #define | JOINT_INDEX_REAR_LEFT 1 |
| #define | JOINT_INDEX_REAR_RIGHT 0 |
Enumerations | |
| enum | RunningMode { FORWARD, BACK } |
| enum | RunningState { FORWARD, FORWARD_STOP, BACK, BACK_STOP, OTHERWISE } |
Functions | |
| template<typename N , typename M > | |
| double | MAX (const N &a, const M &b) |
| template<typename N , typename M > | |
| double | MIN (const N &a, const M &b) |
| template<typename T > | |
| double | NORMALIZE (const T &z) |
Define Documentation
| #define JOINT_INDEX_FRONT 2 |
Definition at line 17 of file ixis_imcs01_driver.h.
| #define JOINT_INDEX_REAR_LEFT 1 |
Definition at line 16 of file ixis_imcs01_driver.h.
| #define JOINT_INDEX_REAR_RIGHT 0 |
Definition at line 15 of file ixis_imcs01_driver.h.
Enumeration Type Documentation
| enum RunningMode |
Definition at line 46 of file ixis_imcs01_driver.h.
| enum RunningState |
Definition at line 37 of file ixis_imcs01_driver.h.
Function Documentation
template<typename N , typename M >
| double MAX | ( | const N & | a, |
| const M & | b | ||
| ) | [inline] |
Definition at line 26 of file ixis_imcs01_driver.h.
template<typename N , typename M >
| double MIN | ( | const N & | a, |
| const M & | b | ||
| ) | [inline] |
Definition at line 20 of file ixis_imcs01_driver.h.
Definition at line 32 of file ixis_imcs01_driver.h.