#include "cartographer/mapping/internal/optimization/cost_functions/spa_cost_function_2d.h"#include <memory>#include "cartographer/transform/rigid_transform.h"#include "gmock/gmock.h"#include "gtest/gtest.h"
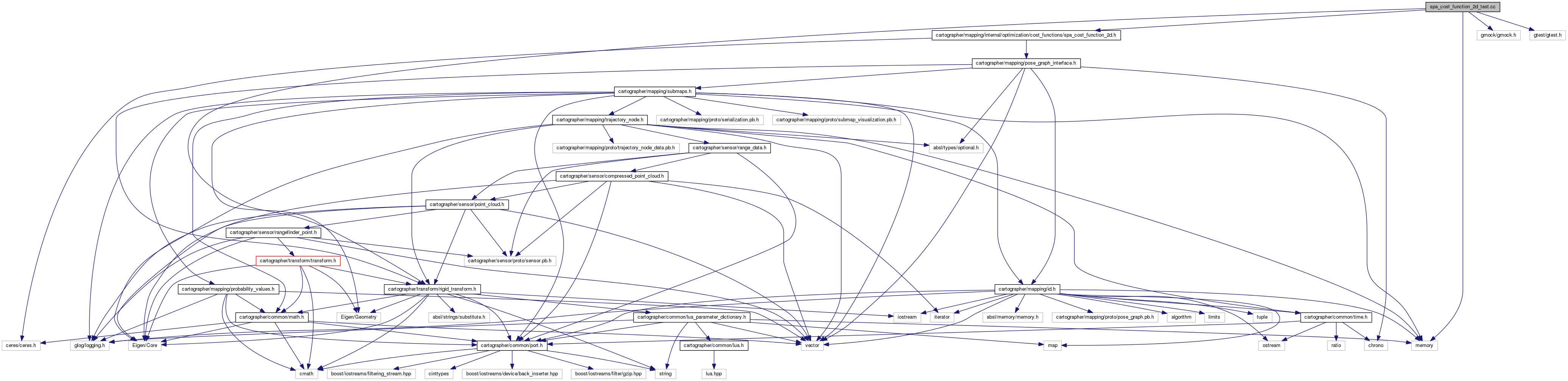
Include dependency graph for spa_cost_function_2d_test.cc:
Go to the source code of this file.
Namespaces | |
| namespace | cartographer |
| namespace | cartographer::mapping |
| namespace | cartographer::mapping::optimization |
Variable Documentation
| std::unique_ptr<ceres::CostFunction> analytical_cost_ |
Definition at line 83 of file spa_cost_function_2d_test.cc.
| std::unique_ptr<ceres::CostFunction> auto_diff_cost_ |
Definition at line 82 of file spa_cost_function_2d_test.cc.
| PoseGraphInterface::Constraint::Pose constraint_ |
Definition at line 81 of file spa_cost_function_2d_test.cc.
| JacobianType jacobian_ |
Definition at line 79 of file spa_cost_function_2d_test.cc.
| std::array<double*, kParameterBlocksCount> jacobian_ptrs_ |
Definition at line 80 of file spa_cost_function_2d_test.cc.
| ResidualType residuals_ |
Definition at line 78 of file spa_cost_function_2d_test.cc.