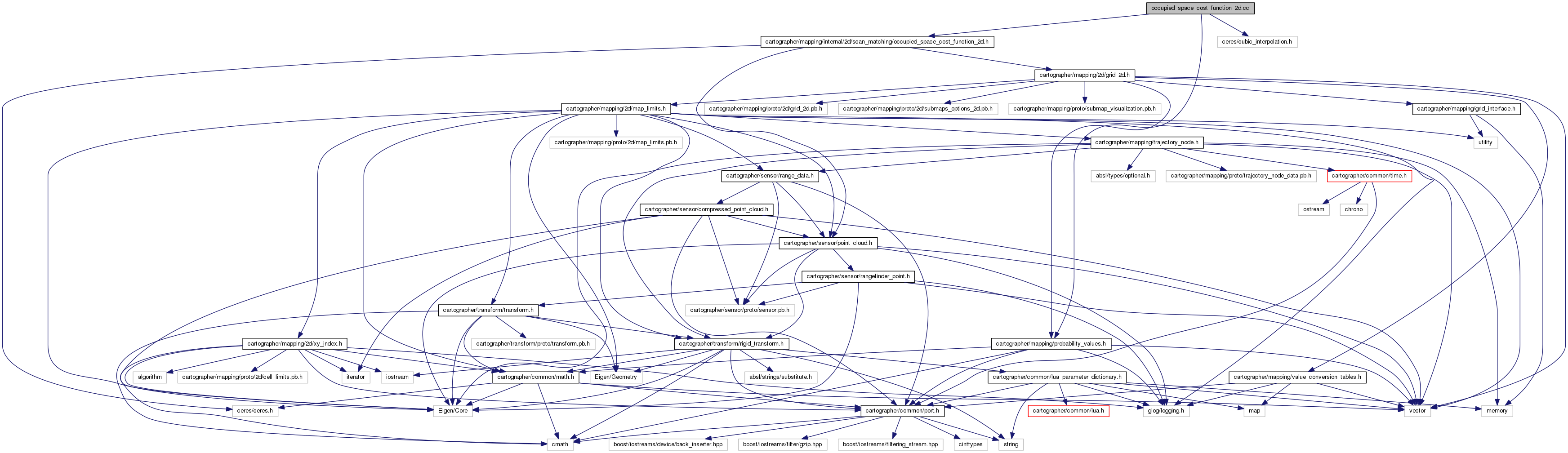
#include "cartographer/mapping/internal/2d/scan_matching/occupied_space_cost_function_2d.h"#include "cartographer/mapping/probability_values.h"#include "ceres/cubic_interpolation.h"
Include dependency graph for occupied_space_cost_function_2d.cc:
Go to the source code of this file.
Namespaces | |
| namespace | cartographer |
| namespace | cartographer::mapping |
| namespace | cartographer::mapping::scan_matching |
Functions | |
| ceres::CostFunction * | cartographer::mapping::scan_matching::CreateOccupiedSpaceCostFunction2D (const double scaling_factor, const sensor::PointCloud &point_cloud, const Grid2D &grid) |
Variable Documentation
| const Grid2D& grid_ |
Definition at line 95 of file occupied_space_cost_function_2d.cc.
constexpr int kPadding = INT_MAX / 4 [static] |
Definition at line 69 of file occupied_space_cost_function_2d.cc.
| const sensor::PointCloud& point_cloud_ |
Definition at line 103 of file occupied_space_cost_function_2d.cc.
| const double scaling_factor_ |
Definition at line 102 of file occupied_space_cost_function_2d.cc.