#include <opencv2/opencv.hpp>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/ModelCoefficients.h>#include <Eigen/Dense>#include <Eigen/Geometry>#include <cstddef>
Include dependency graph for camera_pose_calibration.hpp:

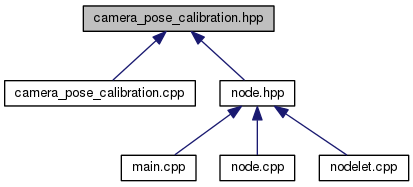
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | camera_pose_calibration::CalibrationInformation |
Namespaces | |
| namespace | camera_pose_calibration |
Functions | |
| Eigen::Isometry3d | camera_pose_calibration::findCalibration (cv::Mat const &image, pcl::PointCloud< pcl::PointXYZ >::Ptr cloud, cv::Size const pattern_size, double pattern_distance, double neighbor_distance=0.01, double valid_pattern_ratio_threshold=0.7, double point_cloud_scale_x=1.0, double point_cloud_scale_y=1.0, CalibrationInformation *debug_information=NULL) |
| Finds the isometry for the asymmetric calibration pattern in the image and pointcloud. | |
| Eigen::Isometry3d | camera_pose_calibration::findCalibration (cv::Mat const &left_image, cv::Mat const &right_image, Eigen::Matrix4d const &reprojection, cv::Size const pattern_size, double pattern_distance) |
| Finds the isometry for the asymmetric calibration pattern, given two (undistorted) stereo images and a reprojection matrix. | |