Public Member Functions | |
| virtual void | halt () override |
| void | setRequiredTime (Millisecond ms) |
| SimpleCoroAction (milliseconds timeout, bool will_fail, const std::string &node_name, const BT::NodeConfiguration &config) | |
| bool | wasHalted () |
Public Attributes | |
| bool | will_fail_ |
Protected Member Functions | |
| virtual BT::NodeStatus | tick () override |
| Method to be implemented by the user. | |
Private Attributes | |
| bool | halted_ |
| Timepoint | start_time_ |
| std::chrono::milliseconds | timeout_ |
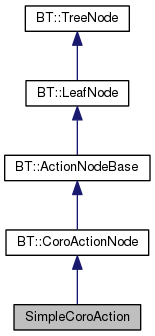
Detailed Description
Definition at line 11 of file gtest_coroutines.cpp.
Constructor & Destructor Documentation
| SimpleCoroAction::SimpleCoroAction | ( | milliseconds | timeout, |
| bool | will_fail, | ||
| const std::string & | node_name, | ||
| const BT::NodeConfiguration & | config | ||
| ) | [inline] |
Definition at line 14 of file gtest_coroutines.cpp.
Member Function Documentation
| virtual void SimpleCoroAction::halt | ( | ) | [inline, override, virtual] |
You may want to override this method. But still, remember to call this implementation too.
Example:
void MyAction::halt() { // do your stuff here CoroActionNode::halt(); }
Reimplemented from BT::CoroActionNode.
Definition at line 24 of file gtest_coroutines.cpp.
| void SimpleCoroAction::setRequiredTime | ( | Millisecond | ms | ) | [inline] |
Definition at line 37 of file gtest_coroutines.cpp.
| virtual BT::NodeStatus SimpleCoroAction::tick | ( | ) | [inline, override, protected, virtual] |
Method to be implemented by the user.
Implements BT::TreeNode.
Definition at line 43 of file gtest_coroutines.cpp.
| bool SimpleCoroAction::wasHalted | ( | ) | [inline] |
Definition at line 32 of file gtest_coroutines.cpp.
Member Data Documentation
bool SimpleCoroAction::halted_ [private] |
Definition at line 71 of file gtest_coroutines.cpp.
Timepoint SimpleCoroAction::start_time_ [private] |
Definition at line 70 of file gtest_coroutines.cpp.
std::chrono::milliseconds SimpleCoroAction::timeout_ [private] |
Definition at line 69 of file gtest_coroutines.cpp.
Definition at line 66 of file gtest_coroutines.cpp.
The documentation for this class was generated from the following file: