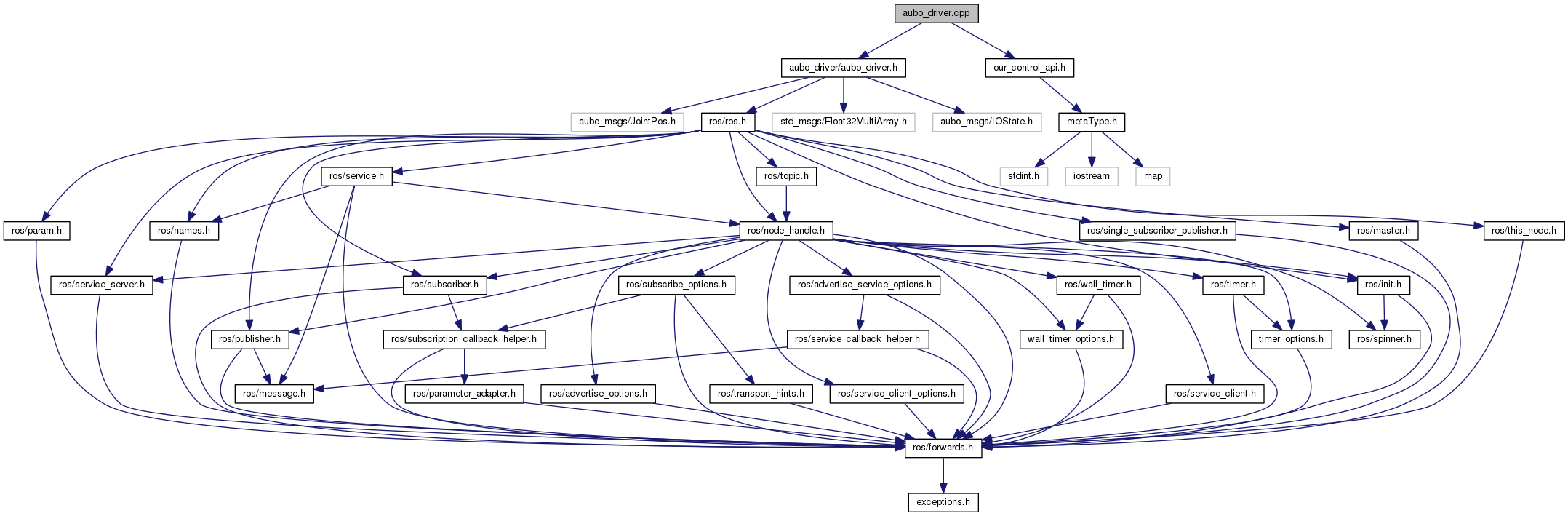
Include dependency graph for aubo_driver.cpp:
Go to the source code of this file.
Functions | |
| int | connect_server (const char *server_ip, int server_port) |
| int | disconnect_server () |
| int | get_current_position (double *pos) |
| double | get_robot_io (int io_type, int io_mode, int io_index) |
| int | main (int argc, char **argv) |
| int | road_point_compare (double *goal) |
| int | set_robot_io (int io_type, int io_mode, int io_index, double io_value) |
Variables | |
| double | last_road_point [6] |
Function Documentation
| int connect_server | ( | const char * | server_ip, |
| int | server_port | ||
| ) |
Definition at line 33 of file aubo_driver.cpp.
| int disconnect_server | ( | ) |
Definition at line 46 of file aubo_driver.cpp.
| int get_current_position | ( | double * | pos | ) |
Definition at line 54 of file aubo_driver.cpp.
| double get_robot_io | ( | int | io_type, |
| int | io_mode, | ||
| int | io_index | ||
| ) |
Definition at line 81 of file aubo_driver.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 216 of file aubo_driver.cpp.
| int road_point_compare | ( | double * | goal | ) |
Definition at line 7 of file aubo_driver.cpp.
| int set_robot_io | ( | int | io_type, |
| int | io_mode, | ||
| int | io_index, | ||
| double | io_value | ||
| ) |
Definition at line 73 of file aubo_driver.cpp.
Variable Documentation
| double last_road_point[6] |
Definition at line 5 of file aubo_driver.cpp.