Public Types | |
| typedef pcl::PointCloud < pcl::PointXYZRGB > | PointCloud |
Public Member Functions | |
| StereoOdometer (const std::string &transport) | |
Protected Member Functions | |
| void | computeAndPublishPointCloud (const sensor_msgs::CameraInfoConstPtr &l_info_msg, const sensor_msgs::ImageConstPtr &l_image_msg, const sensor_msgs::CameraInfoConstPtr &r_info_msg, const std::vector< Matcher::p_match > &matches, const std::vector< int32_t > &inlier_indices) |
| double | computeFeatureFlow (const std::vector< Matcher::p_match > &matches) |
| void | imageCallback (const sensor_msgs::ImageConstPtr &l_image_msg, const sensor_msgs::ImageConstPtr &r_image_msg, const sensor_msgs::CameraInfoConstPtr &l_info_msg, const sensor_msgs::CameraInfoConstPtr &r_info_msg) |
| void | initOdometer (const sensor_msgs::CameraInfoConstPtr &l_info_msg, const sensor_msgs::CameraInfoConstPtr &r_info_msg) |
Private Attributes | |
| bool | change_reference_frame_ |
| bool | got_lost_ |
| ros::Publisher | info_pub_ |
| ros::Publisher | point_cloud_pub_ |
| int | ref_frame_change_method_ |
| int | ref_frame_inlier_threshold_ |
| double | ref_frame_motion_threshold_ |
| Matrix | reference_motion_ |
| boost::shared_ptr < VisualOdometryStereo > | visual_odometer_ |
| VisualOdometryStereo::parameters | visual_odometer_params_ |
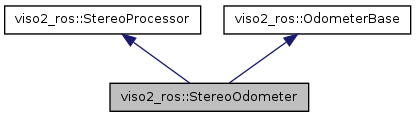
Detailed Description
Definition at line 46 of file stereo_odometer.cpp.
Member Typedef Documentation
| typedef pcl::PointCloud<pcl::PointXYZRGB> viso2_ros::StereoOdometer::PointCloud |
Definition at line 68 of file stereo_odometer.cpp.
Constructor & Destructor Documentation
| viso2_ros::StereoOdometer::StereoOdometer | ( | const std::string & | transport | ) | [inline] |
Definition at line 70 of file stereo_odometer.cpp.
Member Function Documentation
| void viso2_ros::StereoOdometer::computeAndPublishPointCloud | ( | const sensor_msgs::CameraInfoConstPtr & | l_info_msg, |
| const sensor_msgs::ImageConstPtr & | l_image_msg, | ||
| const sensor_msgs::CameraInfoConstPtr & | r_info_msg, | ||
| const std::vector< Matcher::p_match > & | matches, | ||
| const std::vector< int32_t > & | inlier_indices | ||
| ) | [inline, protected] |
Definition at line 272 of file stereo_odometer.cpp.
| double viso2_ros::StereoOdometer::computeFeatureFlow | ( | const std::vector< Matcher::p_match > & | matches | ) | [inline, protected] |
Definition at line 259 of file stereo_odometer.cpp.
| void viso2_ros::StereoOdometer::imageCallback | ( | const sensor_msgs::ImageConstPtr & | l_image_msg, |
| const sensor_msgs::ImageConstPtr & | r_image_msg, | ||
| const sensor_msgs::CameraInfoConstPtr & | l_info_msg, | ||
| const sensor_msgs::CameraInfoConstPtr & | r_info_msg | ||
| ) | [inline, protected, virtual] |
Implement this method in sub-classes
Implements viso2_ros::StereoProcessor.
Definition at line 112 of file stereo_odometer.cpp.
| void viso2_ros::StereoOdometer::initOdometer | ( | const sensor_msgs::CameraInfoConstPtr & | l_info_msg, |
| const sensor_msgs::CameraInfoConstPtr & | r_info_msg | ||
| ) | [inline, protected] |
Definition at line 90 of file stereo_odometer.cpp.
Member Data Documentation
bool viso2_ros::StereoOdometer::change_reference_frame_ [private] |
Definition at line 61 of file stereo_odometer.cpp.
bool viso2_ros::StereoOdometer::got_lost_ [private] |
Definition at line 57 of file stereo_odometer.cpp.
Definition at line 55 of file stereo_odometer.cpp.
Definition at line 54 of file stereo_odometer.cpp.
int viso2_ros::StereoOdometer::ref_frame_change_method_ [private] |
Definition at line 60 of file stereo_odometer.cpp.
int viso2_ros::StereoOdometer::ref_frame_inlier_threshold_ [private] |
Definition at line 63 of file stereo_odometer.cpp.
double viso2_ros::StereoOdometer::ref_frame_motion_threshold_ [private] |
Definition at line 62 of file stereo_odometer.cpp.
Definition at line 64 of file stereo_odometer.cpp.
boost::shared_ptr<VisualOdometryStereo> viso2_ros::StereoOdometer::visual_odometer_ [private] |
Definition at line 51 of file stereo_odometer.cpp.
Definition at line 52 of file stereo_odometer.cpp.
The documentation for this class was generated from the following file: