#include <sr_ronex_simple_controller.hpp>
Public Member Functions | |
| virtual bool | init (ros_ethercat_model::RobotState *robot, ros::NodeHandle &n) |
| SrRoNeXSimpleController () | |
| virtual void | starting (const ros::Time &) |
| virtual void | stopping (const ros::Time &) |
| virtual void | update (const ros::Time &, const ros::Duration &) |
| virtual | ~SrRoNeXSimpleController () |
Private Attributes | |
| ronex::GeneralIO * | general_io_ |
| int | loop_count_ |
Detailed Description
Definition at line 40 of file sr_ronex_simple_controller.hpp.
Constructor & Destructor Documentation
Definition at line 31 of file sr_ronex_simple_controller.cpp.
| ronex::SrRoNeXSimpleController::~SrRoNeXSimpleController | ( | ) | [virtual] |
Definition at line 36 of file sr_ronex_simple_controller.cpp.
Member Function Documentation
| bool ronex::SrRoNeXSimpleController::init | ( | ros_ethercat_model::RobotState * | robot, |
| ros::NodeHandle & | n | ||
| ) | [virtual] |
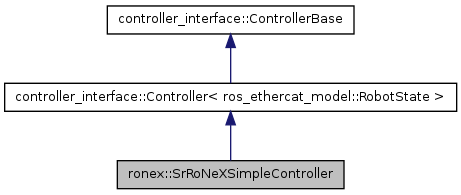
Reimplemented from controller_interface::Controller< ros_ethercat_model::RobotState >.
Definition at line 40 of file sr_ronex_simple_controller.cpp.
| void ronex::SrRoNeXSimpleController::starting | ( | const ros::Time & | ) | [virtual] |
Reimplemented from controller_interface::ControllerBase.
Definition at line 55 of file sr_ronex_simple_controller.cpp.
| void ronex::SrRoNeXSimpleController::stopping | ( | const ros::Time & | ) | [virtual] |
Reimplemented from controller_interface::ControllerBase.
Definition at line 70 of file sr_ronex_simple_controller.cpp.
| void ronex::SrRoNeXSimpleController::update | ( | const ros::Time & | , |
| const ros::Duration & | |||
| ) | [virtual] |
Implements controller_interface::ControllerBase.
Definition at line 60 of file sr_ronex_simple_controller.cpp.
Member Data Documentation
Definition at line 58 of file sr_ronex_simple_controller.hpp.
int ronex::SrRoNeXSimpleController::loop_count_ [private] |
Definition at line 56 of file sr_ronex_simple_controller.hpp.
The documentation for this class was generated from the following files: