Contains the main for the virtual arm. We start the publishers / subscribers in this node. They all share the same VirtualArm object, this way the subscriber can update the arm properties, while the publishers publish up to date data. The diagnostics and the other publisher are started in two different threads, to allow them to be published at different frequencies. More...
#include <ros/ros.h>#include <boost/thread.hpp>#include <boost/smart_ptr.hpp>#include "sr_hand/sr_subscriber.h"#include "sr_hand/sr_publisher.h"#include "sr_hand/sr_diagnosticer.h"#include "sr_hand/hand/virtual_arm.h"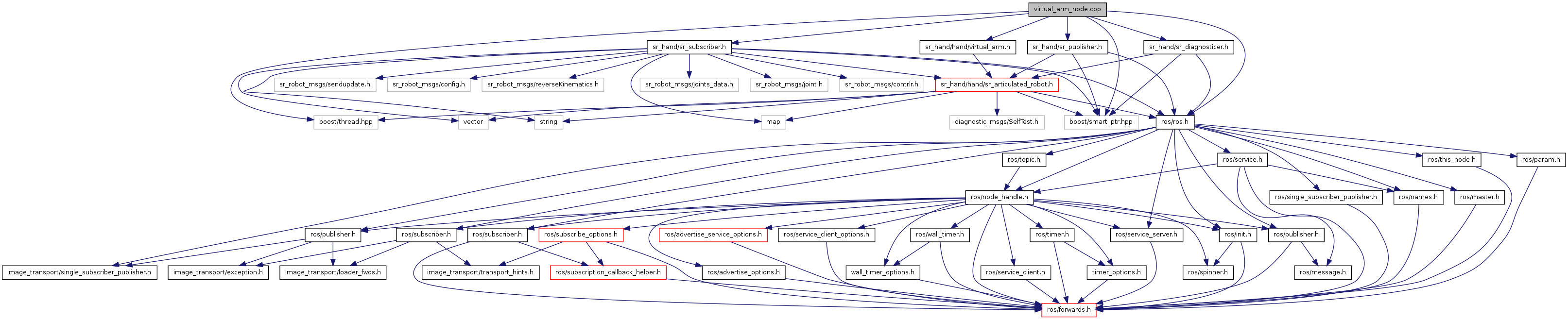
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| void | run_diagnotics (boost::shared_ptr< SRDiagnosticer > shadowhand_diag) |
| void | run_publisher (boost::shared_ptr< SRPublisher > shadowhand_pub) |
Detailed Description
Contains the main for the virtual arm. We start the publishers / subscribers in this node. They all share the same VirtualArm object, this way the subscriber can update the arm properties, while the publishers publish up to date data. The diagnostics and the other publisher are started in two different threads, to allow them to be published at different frequencies.
- Date:
- Tue Jun 29 14:56:10 2010
Copyright 2011 Shadow Robot Company Ltd.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see <http://www.gnu.org/licenses/>.
Definition in file virtual_arm_node.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
The main function initialises this ROS subscriber and sets the different callbacks. This ROS subscriber will listen for new commands and send them to the virtual robot.
- Parameters:
-
argc argv
- Returns:
- 0 on success
Definition at line 73 of file virtual_arm_node.cpp.
| void run_diagnotics | ( | boost::shared_ptr< SRDiagnosticer > | shadowhand_diag | ) |
Definition at line 50 of file virtual_arm_node.cpp.
| void run_publisher | ( | boost::shared_ptr< SRPublisher > | shadowhand_pub | ) |
Definition at line 56 of file virtual_arm_node.cpp.