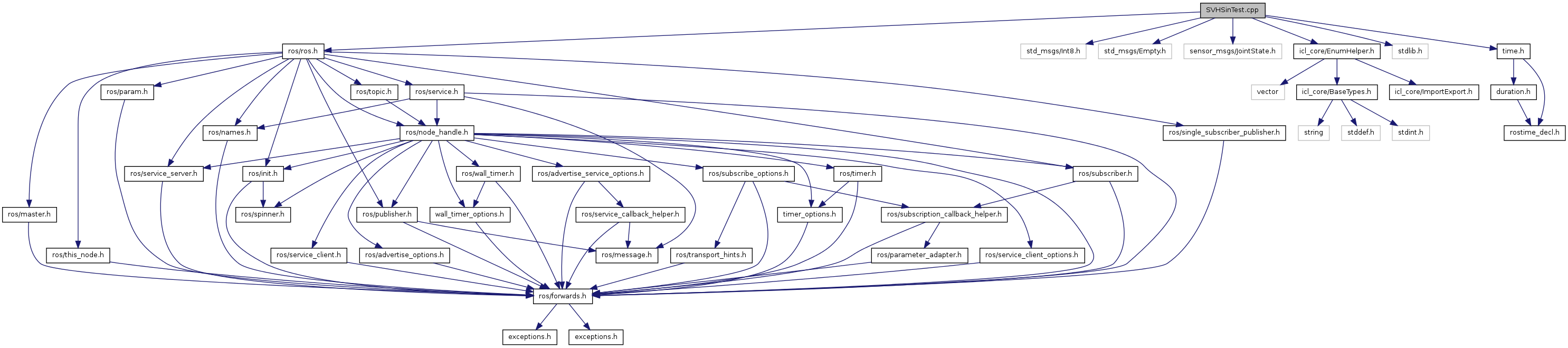
#include <ros/ros.h>#include <std_msgs/Int8.h>#include <std_msgs/Empty.h>#include <sensor_msgs/JointState.h>#include <icl_core/EnumHelper.h>#include <stdlib.h>#include <time.h>
Include dependency graph for SVHSinTest.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| void | runCallback (const std_msgs::Empty &) |
Variables | |
| const double | loop_rate = 50 |
| bool | running = true |
| const double | sin_duration = 10 |
Detailed Description
- Date:
- 2014-09-23
This file contains a very very simple test node that will generate a sin movement for slected fingers of the Schunk Five finger hand. It is only meant to be used as a quick test and demo program to use the Schunk five finger hand and test its operation.
Definition in file SVHSinTest.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 65 of file SVHSinTest.cpp.
| void runCallback | ( | const std_msgs::Empty & | ) |
Definition at line 56 of file SVHSinTest.cpp.
Variable Documentation
| const double loop_rate = 50 |
Definition at line 45 of file SVHSinTest.cpp.
| bool running = true |
Definition at line 51 of file SVHSinTest.cpp.
| const double sin_duration = 10 |
Definition at line 47 of file SVHSinTest.cpp.