Public Member Functions | |
| bool | connect (const std::string &rtt_operation_name, const std::string &ros_service_name, const std::string &ros_service_type) |
| Connect an RTT operation or operation caller to a ROS service server or service client. | |
| RTT::OperationInterfacePart * | get_owner_operation (const std::string rtt_uri) |
| Get an RTT operation from a string identifier. | |
| RTT::base::OperationCallerBaseInvoker * | get_owner_operation_caller (const std::string rtt_uri) |
| Get an RTT operation caller from a string identifier. | |
| ROSServiceService (TaskContext *owner) | |
Public Attributes | |
| std::map< std::string, ROSServiceClientProxyBase * > | client_proxies_ |
| RTT::OperationCaller < ROSServiceProxyFactoryBase *(const std::string &)> | get_service_factory |
| RTT::OperationCaller< bool(const std::string &)> | has_service_factory |
| RTT::Service::shared_ptr | rosservice_registry_ |
| std::map< std::string, ROSServiceServerProxyBase * > | server_proxies_ |
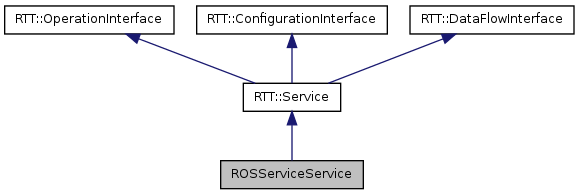
Detailed Description
The globally loadable ROS service.
Definition at line 15 of file rtt_rosservice_service.cpp.
Constructor & Destructor Documentation
| ROSServiceService::ROSServiceService | ( | TaskContext * | owner | ) | [inline] |
Instantiates this service.
- Parameters:
-
owner The owner or null in case of global.
Definition at line 22 of file rtt_rosservice_service.cpp.
Member Function Documentation
| bool ROSServiceService::connect | ( | const std::string & | rtt_operation_name, |
| const std::string & | ros_service_name, | ||
| const std::string & | ros_service_type | ||
| ) | [inline] |
Connect an RTT operation or operation caller to a ROS service server or service client.
Definition at line 102 of file rtt_rosservice_service.cpp.
| RTT::OperationInterfacePart* ROSServiceService::get_owner_operation | ( | const std::string | rtt_uri | ) | [inline] |
Get an RTT operation from a string identifier.
Definition at line 71 of file rtt_rosservice_service.cpp.
| RTT::base::OperationCallerBaseInvoker* ROSServiceService::get_owner_operation_caller | ( | const std::string | rtt_uri | ) | [inline] |
Get an RTT operation caller from a string identifier.
Definition at line 42 of file rtt_rosservice_service.cpp.
Member Data Documentation
| std::map<std::string, ROSServiceClientProxyBase*> ROSServiceService::client_proxies_ |
Definition at line 162 of file rtt_rosservice_service.cpp.
| RTT::OperationCaller<ROSServiceProxyFactoryBase*(const std::string&)> ROSServiceService::get_service_factory |
Definition at line 159 of file rtt_rosservice_service.cpp.
| RTT::OperationCaller<bool(const std::string&)> ROSServiceService::has_service_factory |
Definition at line 158 of file rtt_rosservice_service.cpp.
Definition at line 157 of file rtt_rosservice_service.cpp.
| std::map<std::string, ROSServiceServerProxyBase*> ROSServiceService::server_proxies_ |
Definition at line 161 of file rtt_rosservice_service.cpp.
The documentation for this class was generated from the following file: