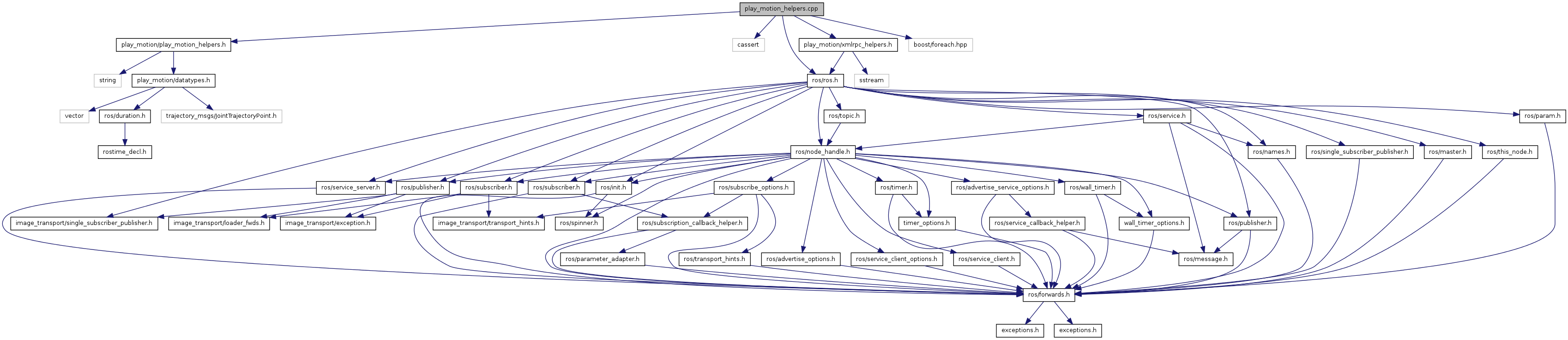
#include "play_motion/play_motion_helpers.h"#include <cassert>#include <ros/ros.h>#include <boost/foreach.hpp>#include "play_motion/xmlrpc_helpers.h"
Include dependency graph for play_motion_helpers.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | play_motion |
Defines | |
| #define | foreach BOOST_FOREACH |
Functions | |
| void | play_motion::extractJoints (xh::Array &joint_names, JointNames &motion_joints) |
| void | play_motion::extractTrajectory (xh::Array &traj_points, Trajectory &motion_points) |
| void | play_motion::getMotion (const ros::NodeHandle &nh, const std::string &motion_id, MotionInfo &motion_info) |
| Parse a motion specified in the ROS parameter server into a data structure. | |
| void | play_motion::getMotion (const std::string &motion_id, MotionInfo &motion_info) |
| ros::Duration | play_motion::getMotionDuration (const ros::NodeHandle &nh, const std::string &motion_id) |
| getMotionDuration gets the total duration of a motion | |
| ros::Duration | play_motion::getMotionDuration (const std::string &motion_id) |
| void | play_motion::getMotionIds (const ros::NodeHandle &nh, MotionNames &motion_ids) |
| getMotions obtain all motion names | |
| void | play_motion::getMotionIds (MotionNames &motion_ids) |
| void | play_motion::getMotionJoints (const ros::NodeHandle &nh, const std::string &motion_id, JointNames &motion_joints) |
| void | play_motion::getMotionJoints (const std::string &motion_id, JointNames &motion_joints) |
| void | play_motion::getMotionPoints (const ros::NodeHandle &nh, const std::string &motion_id, Trajectory &motion_points) |
| void | play_motion::getMotionPoints (const std::string &motion_id, Trajectory &motion_points) |
| ros::NodeHandle | play_motion::getMotionsNodeHandle (const ros::NodeHandle &nh) |
| bool | play_motion::isAlreadyThere (const JointNames &target_joints, const TrajPoint &target_point, const JointNames &source_joints, const TrajPoint &source_point, double tolerance=0.15) |
| isAlreadyThere checks if the source trajPoint matches the target trajPoint with a certain tolerance only the joints in targetJoint will be checked | |
| bool | play_motion::motionExists (const ros::NodeHandle &nh, const std::string &motion_id) |
| bool | play_motion::motionExists (const std::string &motion_id) |
| void | play_motion::populateVelocities (const TrajPoint &point_prev, const TrajPoint &point_next, TrajPoint &point_curr) |
| Populate joint velocity information of a trajectory waypoint. | |
| void | play_motion::populateVelocities (const Trajectory &traj_in, Trajectory &traj_out) |
| Populate joint velocity information of a trajectory. | |
Define Documentation
| #define foreach BOOST_FOREACH |
Definition at line 44 of file play_motion_helpers.cpp.