#include <pcl/sample_consensus/sac_model.h>#include <pcl/sample_consensus/sac_model_plane.h>#include <pcl/sample_consensus/sac_model_perpendicular_plane.h>#include <pcl/sample_consensus/model_types.h>
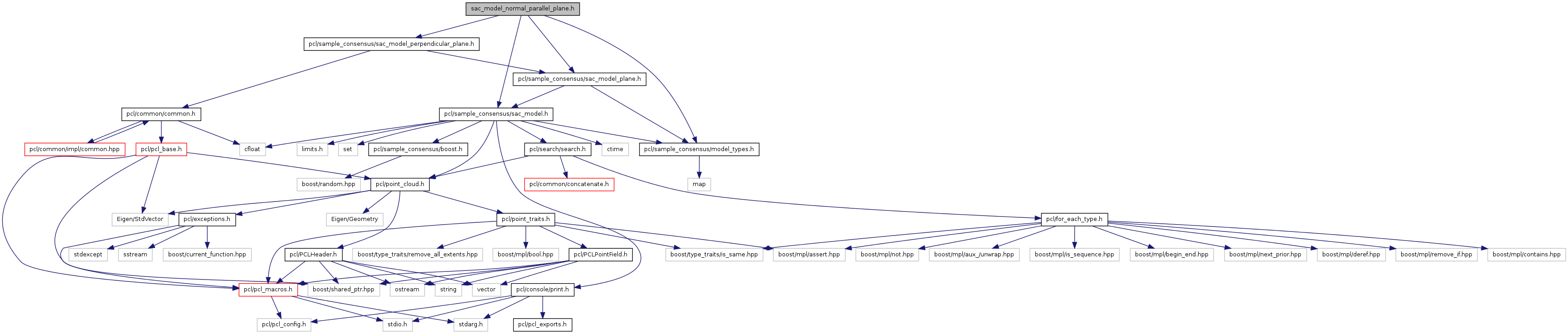
Include dependency graph for sac_model_normal_parallel_plane.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::SampleConsensusModelNormalParallelPlane< PointT, PointNT > |
| SampleConsensusModelNormalParallelPlane defines a model for 3D plane segmentation using additional surface normal constraints. Basically this means that checking for inliers will not only involve a "distance to
model" criterion, but also an additional "maximum angular deviation" between the plane's normal and the inlier points normals. In addition, the plane normal must lie parallel to an user-specified axis. More... | |
Namespaces | |
| namespace | pcl |