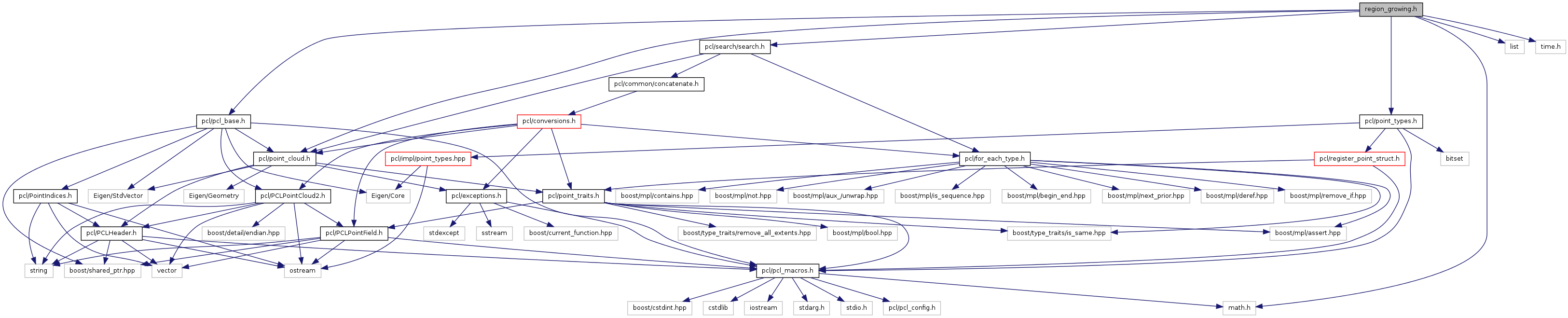
#include <pcl/pcl_base.h>#include <pcl/search/search.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <list>#include <math.h>#include <time.h>
Include dependency graph for region_growing.h:
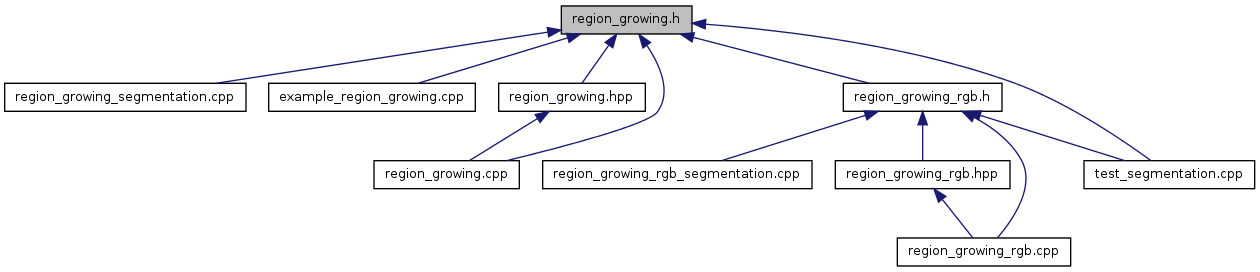
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::RegionGrowing< PointT, NormalT > |
| Implements the well known Region Growing algorithm used for segmentation. Description can be found in the article "Segmentation of point clouds using smoothness constraint" by T. Rabbania, F. A. van den Heuvelb, G. Vosselmanc. In addition to residual test, the possibility to test curvature is added. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| bool | pcl::comparePair (std::pair< float, int > i, std::pair< float, int > j) |
| This function is used as a comparator for sorting. | |