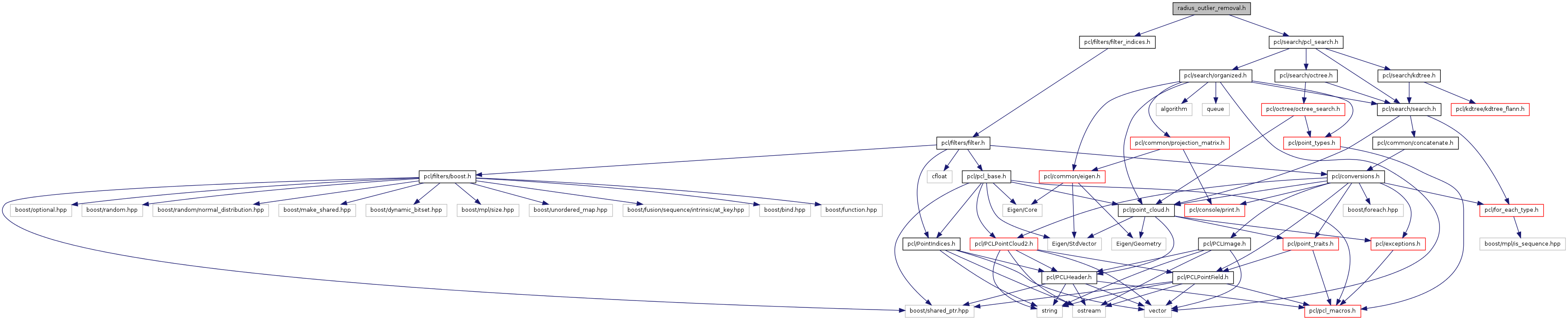
Include dependency graph for radius_outlier_removal.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::RadiusOutlierRemoval< PointT > |
| RadiusOutlierRemoval filters points in a cloud based on the number of neighbors they have. More... | |
| class | pcl::RadiusOutlierRemoval< pcl::PCLPointCloud2 > |
| RadiusOutlierRemoval is a simple filter that removes outliers if the number of neighbors in a certain search radius is smaller than a given K. More... | |
Namespaces | |
| namespace | pcl |