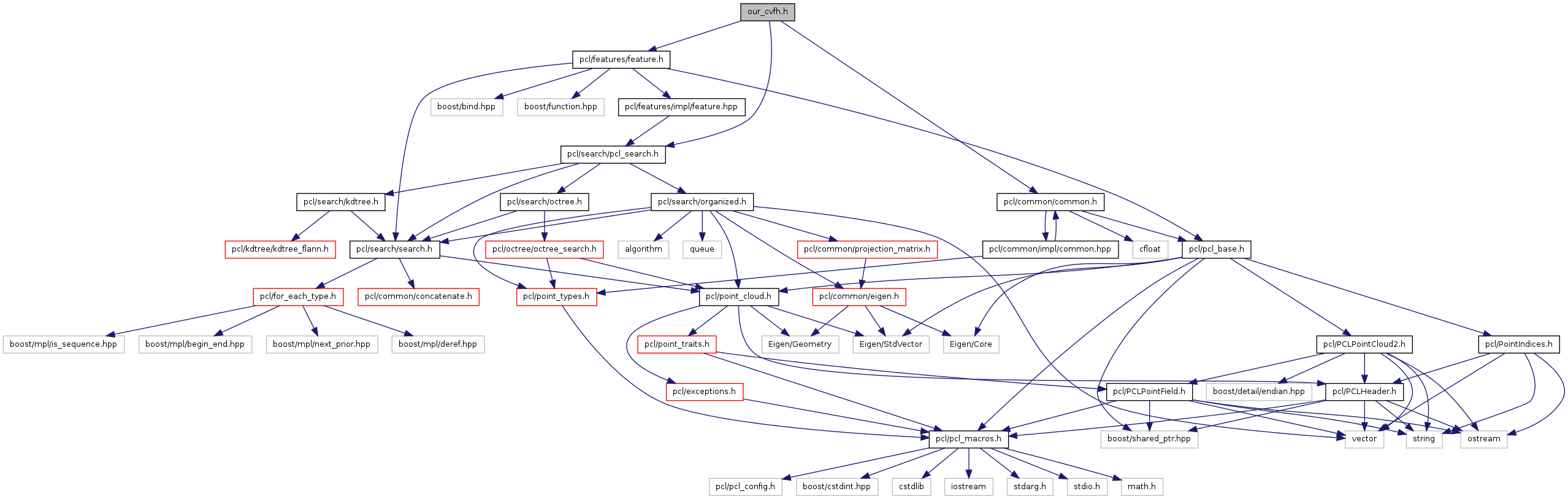
Include dependency graph for our_cvfh.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::OURCVFHEstimation< PointInT, PointNT, PointOutT > |
| OURCVFHEstimation estimates the Oriented, Unique and Repetable Clustered Viewpoint Feature Histogram (CVFH) descriptor for a given point cloud dataset given XYZ data and normals, as presented in: More... | |
Namespaces | |
| namespace | pcl |