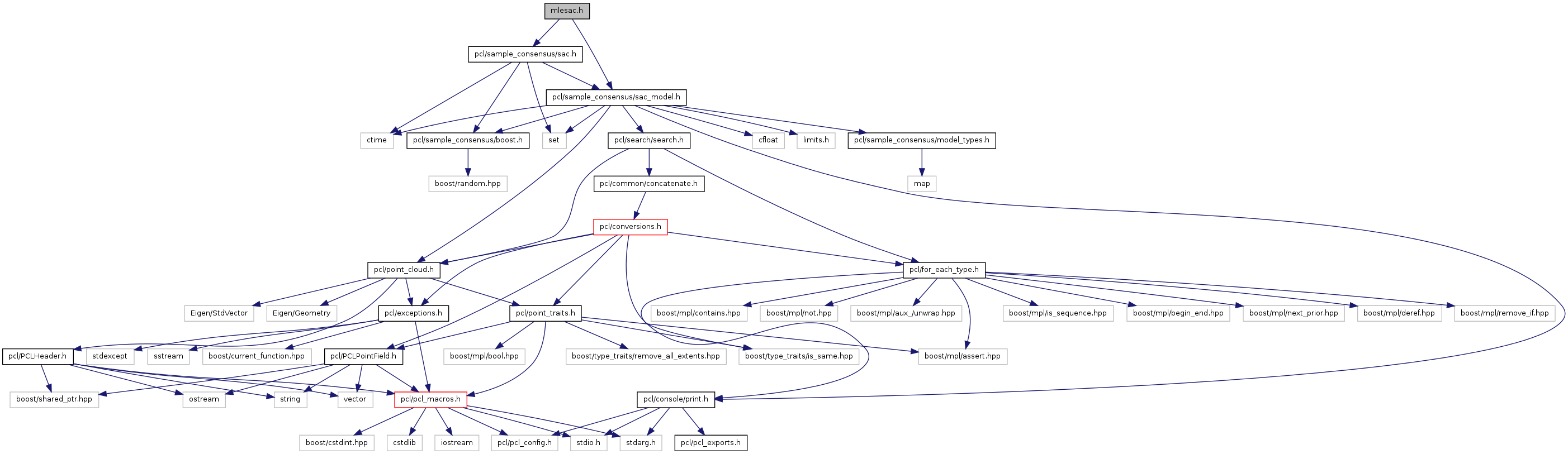
Include dependency graph for mlesac.h:
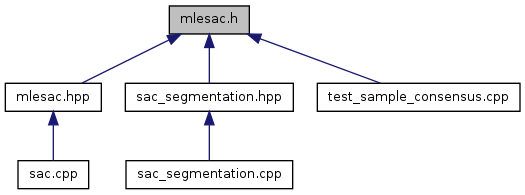
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::MaximumLikelihoodSampleConsensus< PointT > |
| MaximumLikelihoodSampleConsensus represents an implementation of the MLESAC (Maximum Likelihood Estimator SAmple Consensus) algorithm, as described in: "MLESAC: A new robust estimator with application to
estimating image geometry", P.H.S. Torr and A. Zisserman, Computer Vision and Image Understanding, vol 78, 2000. More... | |
Namespaces | |
| namespace | pcl |