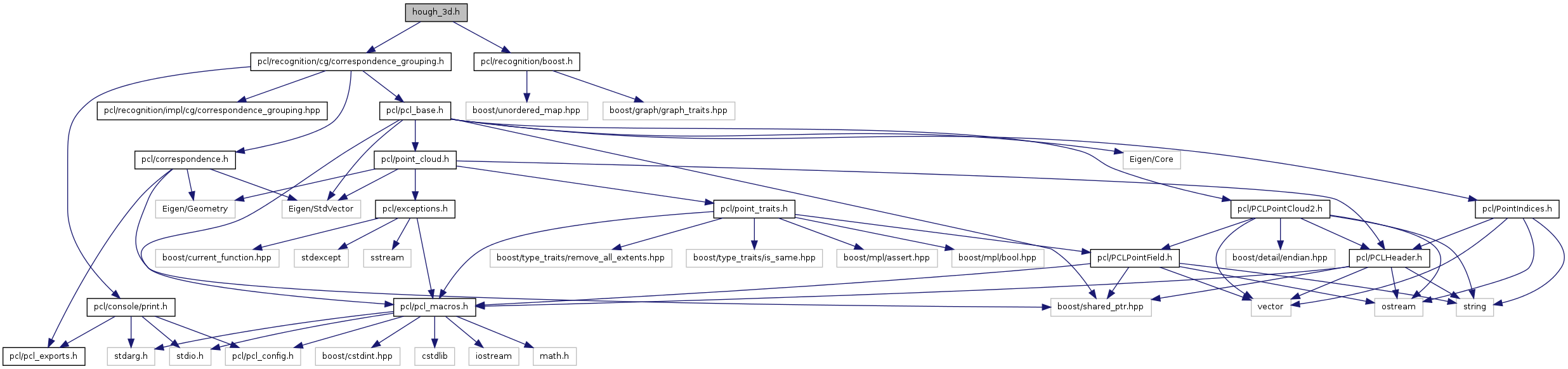
Include dependency graph for hough_3d.h:
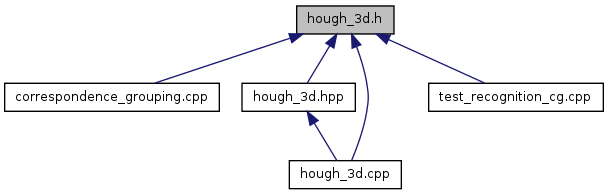
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::Hough3DGrouping< PointModelT, PointSceneT, PointModelRfT, PointSceneRfT > |
| Class implementing a 3D correspondence grouping algorithm that can deal with multiple instances of a model template found into a given scene. Each correspondence casts a vote for a reference point in a 3D Hough Space. The remaining 3 DOF are taken into account by associating each correspondence with a local Reference Frame. The suggested PointModelRfT is pcl::ReferenceFrame. More... | |
| class | pcl::recognition::HoughSpace3D |
| HoughSpace3D is a 3D voting space. Cast votes can be interpolated in order to better deal with approximations introduced by bin quantization. A weight can also be associated with each vote. More... | |
Namespaces | |
| namespace | pcl |
| namespace | pcl::recognition |