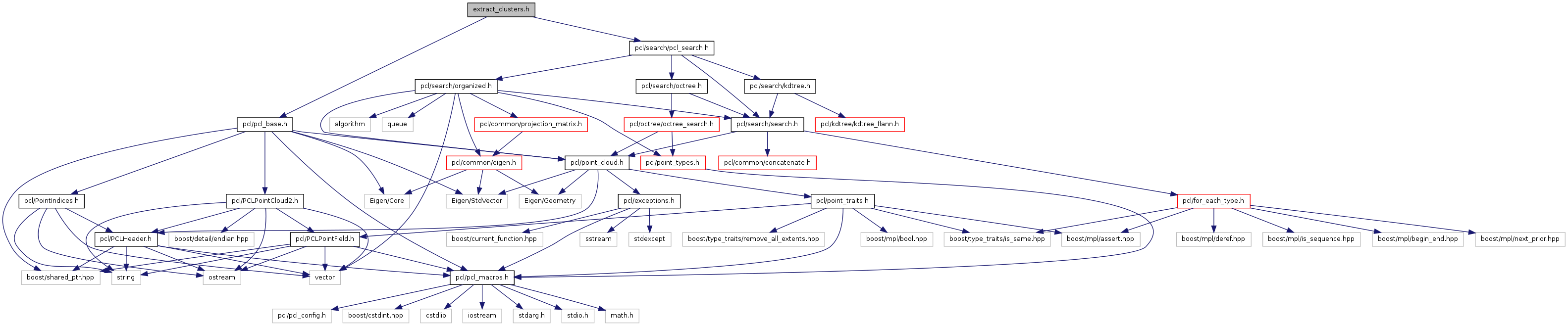
Include dependency graph for extract_clusters.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::EuclideanClusterExtraction< PointT > |
| EuclideanClusterExtraction represents a segmentation class for cluster extraction in an Euclidean sense. More... | |
Namespaces | |
| namespace | pcl |
Functions | |
| bool | pcl::comparePointClusters (const pcl::PointIndices &a, const pcl::PointIndices &b) |
| Sort clusters method (for std::sort). | |
| template<typename PointT > | |
| void | pcl::extractEuclideanClusters (const PointCloud< PointT > &cloud, const boost::shared_ptr< search::Search< PointT > > &tree, float tolerance, std::vector< PointIndices > &clusters, unsigned int min_pts_per_cluster=1, unsigned int max_pts_per_cluster=(std::numeric_limits< int >::max)()) |
| Decompose a region of space into clusters based on the Euclidean distance between points. | |
| template<typename PointT > | |
| void | pcl::extractEuclideanClusters (const PointCloud< PointT > &cloud, const std::vector< int > &indices, const boost::shared_ptr< search::Search< PointT > > &tree, float tolerance, std::vector< PointIndices > &clusters, unsigned int min_pts_per_cluster=1, unsigned int max_pts_per_cluster=(std::numeric_limits< int >::max)()) |
| Decompose a region of space into clusters based on the Euclidean distance between points. | |
| template<typename PointT , typename Normal > | |
| void | pcl::extractEuclideanClusters (const PointCloud< PointT > &cloud, const PointCloud< Normal > &normals, float tolerance, const boost::shared_ptr< KdTree< PointT > > &tree, std::vector< PointIndices > &clusters, double eps_angle, unsigned int min_pts_per_cluster=1, unsigned int max_pts_per_cluster=(std::numeric_limits< int >::max)()) |
| Decompose a region of space into clusters based on the euclidean distance between points, and the normal angular deviation. | |
| template<typename PointT , typename Normal > | |
| void | pcl::extractEuclideanClusters (const PointCloud< PointT > &cloud, const PointCloud< Normal > &normals, const std::vector< int > &indices, const boost::shared_ptr< KdTree< PointT > > &tree, float tolerance, std::vector< PointIndices > &clusters, double eps_angle, unsigned int min_pts_per_cluster=1, unsigned int max_pts_per_cluster=(std::numeric_limits< int >::max)()) |
| Decompose a region of space into clusters based on the euclidean distance between points, and the normal angular deviation. | |