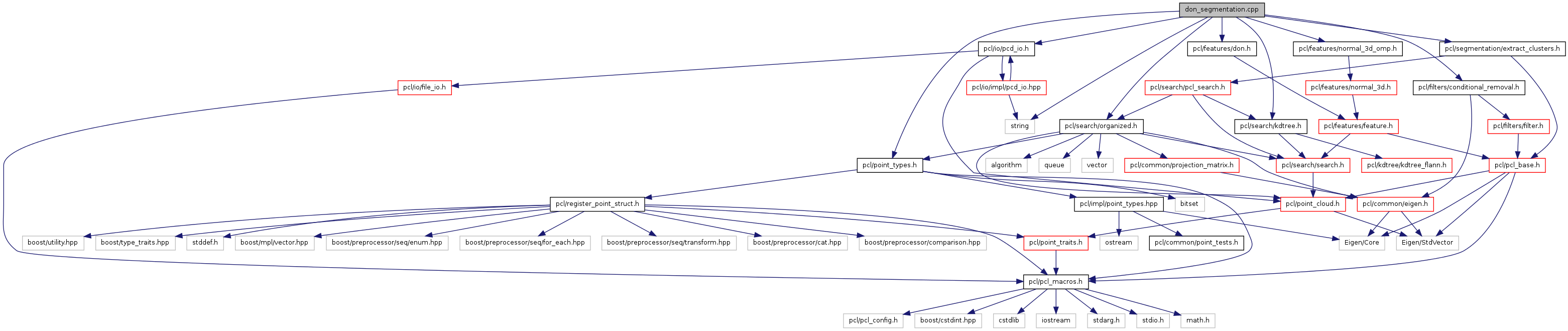
#include <string>#include <pcl/point_types.h>#include <pcl/io/pcd_io.h>#include <pcl/search/organized.h>#include <pcl/search/kdtree.h>#include <pcl/features/normal_3d_omp.h>#include <pcl/filters/conditional_removal.h>#include <pcl/segmentation/extract_clusters.h>#include <pcl/features/don.h>
Include dependency graph for don_segmentation.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
Detailed Description
Difference of Normals Example for PCL Segmentation Tutorials.
- Date:
- 2012-09-24
Definition in file don_segmentation.cpp.
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
The smallest scale to use in the DoN filter.
The largest scale to use in the DoN filter.
The minimum DoN magnitude to threshold by
segment scene into clusters with given distance tolerance using euclidean clustering
the file to read from.
small scale
large scale
NOTE: setting viewpoint is very important, so that we can ensure normals are all pointed in the same direction!
Definition at line 24 of file don_segmentation.cpp.