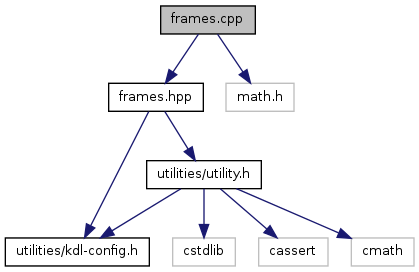
Include dependency graph for frames.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | KDL |
Defines | |
| #define | _USE_MATH_DEFINES |
Functions | |
| bool | KDL::Equal (const Rotation &a, const Rotation &b, double eps) |
| Rotation | KDL::operator* (const Rotation &lhs, const Rotation &rhs) |
| bool | KDL::operator== (const Rotation &a, const Rotation &b) |
Define Documentation
| #define _USE_MATH_DEFINES |
Definition at line 30 of file frames.cpp.