#include <moveit/planning_scene_monitor/trajectory_monitor.h>#include <moveit/trajectory_processing/trajectory_tools.h>#include <ros/rate.h>#include <limits>
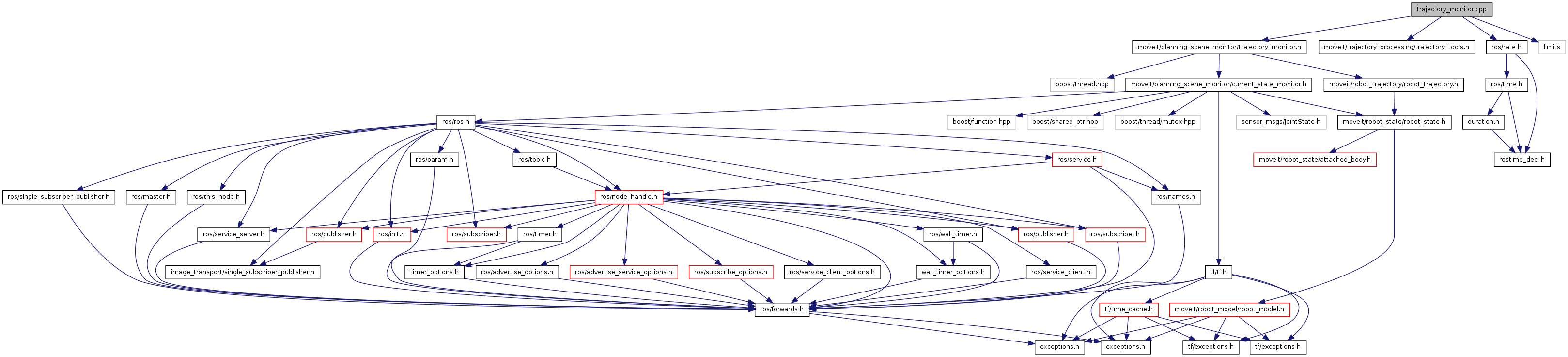
Include dependency graph for trajectory_monitor.cpp:
#include <moveit/planning_scene_monitor/trajectory_monitor.h>#include <moveit/trajectory_processing/trajectory_tools.h>#include <ros/rate.h>#include <limits>