#include <moveit/robot_model/robot_model.h>#include <moveit_msgs/RobotTrajectory.h>#include <sensor_msgs/JointState.h>#include <std_msgs/String.h>#include <ros/ros.h>#include <moveit/controller_manager/controller_manager.h>#include <boost/thread.hpp>#include <pluginlib/class_loader.h>#include <boost/scoped_ptr.hpp>
Include dependency graph for trajectory_execution_manager.h:

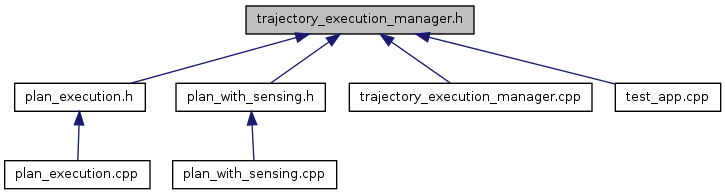
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | trajectory_execution_manager::TrajectoryExecutionManager::ControllerInformation |
| struct | trajectory_execution_manager::TrajectoryExecutionManager::TrajectoryExecutionContext |
| Data structure that represents information necessary to execute a trajectory. More... | |
| class | trajectory_execution_manager::TrajectoryExecutionManager |
Namespaces | |
| namespace | trajectory_execution_manager |
Typedefs | |
| typedef boost::shared_ptr < const TrajectoryExecutionManager > | trajectory_execution_manager::TrajectoryExecutionManagerConstPtr |
| typedef boost::shared_ptr < TrajectoryExecutionManager > | trajectory_execution_manager::TrajectoryExecutionManagerPtr |