MAVROS UAS manager. More...
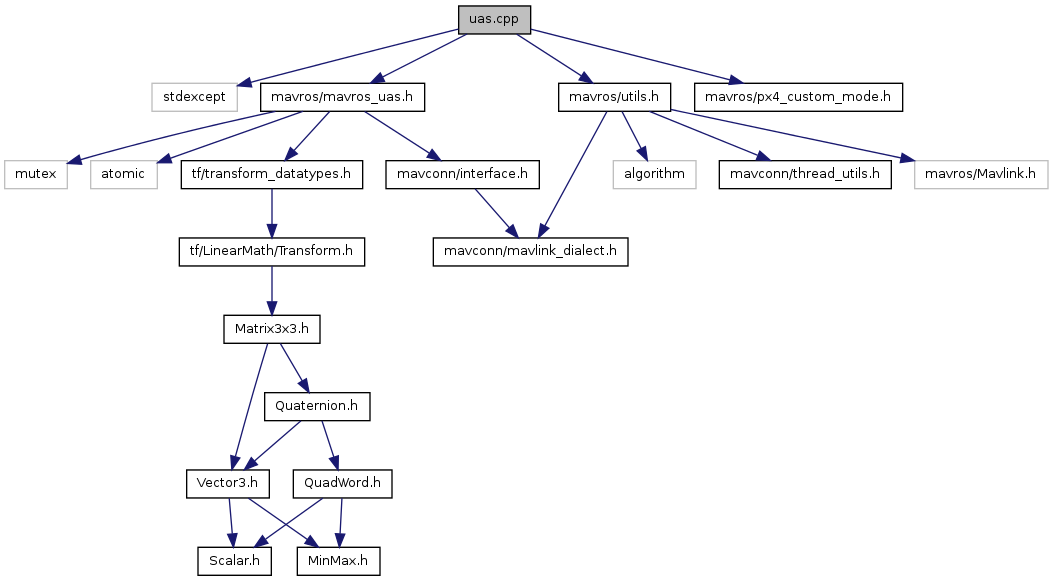
#include <stdexcept>#include <mavros/mavros_uas.h>#include <mavros/utils.h>#include <mavros/px4_custom_mode.h>
Include dependency graph for uas.cpp:
Go to the source code of this file.
Typedefs | |
| typedef std::map< uint32_t, std::string > | cmode_map |
Functions | |
| static bool | cmode_find_cmap (const cmode_map &cmap, std::string &cmode_str, uint32_t &cmode) |
| static bool | is_apm_copter (enum MAV_TYPE &type) |
| static std::string | str_base_mode (int base_mode) |
| static std::string | str_custom_mode (uint32_t custom_mode) |
| static std::string | str_mode_cmap (const cmode_map &cmap, uint32_t custom_mode) |
| static std::string | str_mode_px4 (uint32_t custom_mode_int) |
Variables | |
| static const cmode_map | arducopter_cmode_map |
| APM:Copter custom mode -> string. | |
| static const cmode_map | arduplane_cmode_map |
| APM:Plane custom mode -> string. | |
| static const cmode_map | px4_cmode_map |
| PX4 custom mode -> string. | |
Detailed Description
MAVROS UAS manager.
Definition in file uas.cpp.
Typedef Documentation
Function Documentation
| static bool cmode_find_cmap | ( | const cmode_map & | cmap, |
| std::string & | cmode_str, | ||
| uint32_t & | cmode | ||
| ) | [static] |
| static bool is_apm_copter | ( | enum MAV_TYPE & | type | ) | [inline, static] |
| static std::string str_base_mode | ( | int | base_mode | ) | [inline, static] |
| static std::string str_custom_mode | ( | uint32_t | custom_mode | ) | [static] |
| static std::string str_mode_cmap | ( | const cmode_map & | cmap, |
| uint32_t | custom_mode | ||
| ) | [static] |
| static std::string str_mode_px4 | ( | uint32_t | custom_mode_int | ) | [inline, static] |
Variable Documentation
const cmode_map arducopter_cmode_map [static] |
const cmode_map arduplane_cmode_map [static] |
Initial value:
{
{ 0, "MANUAL" },
{ 1, "CIRCLE" },
{ 2, "STABILIZE" },
{ 3, "TRAINING" },
{ 4, "ACRO" },
{ 5, "FBWA" },
{ 6, "FBWB" },
{ 7, "CRUISE" },
{ 8, "AUTOTUNE" },
{ 10, "AUTO" },
{ 11, "RTL" },
{ 12, "LOITER" },
{ 14, "LAND" },
{ 15, "GUIDED" },
{ 16, "INITIALISING" }
}
APM:Plane custom mode -> string.
const cmode_map px4_cmode_map [static] |
Initial value:
{
{ px4::define_mode(px4::custom_mode::MAIN_MODE_MANUAL), "MANUAL" },
{ px4::define_mode(px4::custom_mode::MAIN_MODE_ACRO), "ACRO" },
{ px4::define_mode(px4::custom_mode::MAIN_MODE_ALTCTL), "ALTCTL" },
{ px4::define_mode(px4::custom_mode::MAIN_MODE_POSCTL), "POSCTL" },
{ px4::define_mode(px4::custom_mode::MAIN_MODE_OFFBOARD), "OFFBOARD" },
{ px4::define_mode_auto(px4::custom_mode::SUB_MODE_AUTO_MISSION), "AUTO.MISSION" },
{ px4::define_mode_auto(px4::custom_mode::SUB_MODE_AUTO_LOITER), "AUTO.LOITER" },
{ px4::define_mode_auto(px4::custom_mode::SUB_MODE_AUTO_RTL), "AUTO.RTL" },
{ px4::define_mode_auto(px4::custom_mode::SUB_MODE_AUTO_LAND), "AUTO.LAND" },
{ px4::define_mode_auto(px4::custom_mode::SUB_MODE_AUTO_RTGS), "AUTO.RTGS" },
{ px4::define_mode_auto(px4::custom_mode::SUB_MODE_AUTO_READY), "AUTO.READY" },
{ px4::define_mode_auto(px4::custom_mode::SUB_MODE_AUTO_TAKEOFF), "AUTO.TAKEOFF" }
}
PX4 custom mode -> string.