#include <handle_estimator.h>
Public Types | |
| enum | HandleType { NO_HANDLE, HANDLE_SMALL_ENOUGH_STAND_ON_PLANE, HANDLE_SMALL_ENOUGH_LIE_ON_PLANE_Y_LONGEST, HANDLE_SMALL_ENOUGH_LIE_ON_PLANE_X_LONGEST } |
| typedef message_filters::sync_policies::ExactTime < sensor_msgs::PointCloud2, jsk_recognition_msgs::BoundingBox > | SyncPolicy |
Protected Member Functions | |
| virtual void | estimate (const sensor_msgs::PointCloud2::ConstPtr &cloud_msg, const jsk_recognition_msgs::BoundingBox::ConstPtr &box_msg) |
| virtual void | estimateHandle (const HandleType &handle_type, const sensor_msgs::PointCloud2::ConstPtr &cloud_msg, const jsk_recognition_msgs::BoundingBox::ConstPtr &box_msg) |
| virtual void | handleSmallEnoughLieOnPlane (const sensor_msgs::PointCloud2::ConstPtr &cloud_msg, const jsk_recognition_msgs::BoundingBox::ConstPtr &box_msg, bool y_longest) |
| virtual void | handleSmallEnoughStandOnPlane (const sensor_msgs::PointCloud2::ConstPtr &cloud_msg, const jsk_recognition_msgs::BoundingBox::ConstPtr &box_msg) |
| virtual void | onInit () |
| virtual void | selectedIndexCallback (const jsk_recognition_msgs::Int32StampedConstPtr &index) |
| virtual void | subscribe () |
| virtual void | unsubscribe () |
Protected Attributes | |
| int | angle_divide_num_ |
| double | approach_offset_ |
| double | gripper_size_ |
| boost::circular_buffer < boost::tuple < geometry_msgs::PoseArray, geometry_msgs::PoseArray > > | output_buf |
| ros::Publisher | pub_ |
| ros::Publisher | pub_best_ |
| ros::Publisher | pub_preapproach_ |
| ros::Publisher | pub_selected_ |
| ros::Publisher | pub_selected_preapproach_ |
| message_filters::Subscriber < jsk_recognition_msgs::BoundingBox > | sub_box_ |
| ros::Subscriber | sub_index_ |
| message_filters::Subscriber < sensor_msgs::PointCloud2 > | sub_input_ |
| boost::shared_ptr < message_filters::Synchronizer < SyncPolicy > > | sync_ |
| tf::TransformListener * | tf_listener_ |
Detailed Description
Definition at line 58 of file handle_estimator.h.
Member Typedef Documentation
| typedef message_filters::sync_policies::ExactTime< sensor_msgs::PointCloud2, jsk_recognition_msgs::BoundingBox > jsk_pcl_ros::HandleEstimator::SyncPolicy |
Definition at line 62 of file handle_estimator.h.
Member Enumeration Documentation
- Enumerator:
NO_HANDLE HANDLE_SMALL_ENOUGH_STAND_ON_PLANE HANDLE_SMALL_ENOUGH_LIE_ON_PLANE_Y_LONGEST HANDLE_SMALL_ENOUGH_LIE_ON_PLANE_X_LONGEST
Definition at line 63 of file handle_estimator.h.
Member Function Documentation
| void jsk_pcl_ros::HandleEstimator::estimate | ( | const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg, |
| const jsk_recognition_msgs::BoundingBox::ConstPtr & | box_msg | ||
| ) | [protected, virtual] |
Definition at line 79 of file handle_estimator_nodelet.cpp.
| void jsk_pcl_ros::HandleEstimator::estimateHandle | ( | const HandleType & | handle_type, |
| const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg, | ||
| const jsk_recognition_msgs::BoundingBox::ConstPtr & | box_msg | ||
| ) | [protected, virtual] |
Definition at line 126 of file handle_estimator_nodelet.cpp.
| void jsk_pcl_ros::HandleEstimator::handleSmallEnoughLieOnPlane | ( | const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg, |
| const jsk_recognition_msgs::BoundingBox::ConstPtr & | box_msg, | ||
| bool | y_longest | ||
| ) | [protected, virtual] |
Definition at line 204 of file handle_estimator_nodelet.cpp.
| void jsk_pcl_ros::HandleEstimator::handleSmallEnoughStandOnPlane | ( | const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg, |
| const jsk_recognition_msgs::BoundingBox::ConstPtr & | box_msg | ||
| ) | [protected, virtual] |
Definition at line 144 of file handle_estimator_nodelet.cpp.
| void jsk_pcl_ros::HandleEstimator::onInit | ( | void | ) | [protected, virtual] |
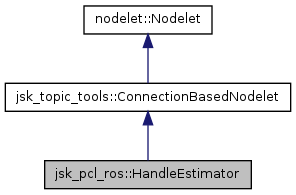
Reimplemented from jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 45 of file handle_estimator_nodelet.cpp.
| void jsk_pcl_ros::HandleEstimator::selectedIndexCallback | ( | const jsk_recognition_msgs::Int32StampedConstPtr & | index | ) | [protected, virtual] |
Definition at line 270 of file handle_estimator_nodelet.cpp.
| void jsk_pcl_ros::HandleEstimator::subscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 62 of file handle_estimator_nodelet.cpp.
| void jsk_pcl_ros::HandleEstimator::unsubscribe | ( | ) | [protected, virtual] |
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 72 of file handle_estimator_nodelet.cpp.
Member Data Documentation
int jsk_pcl_ros::HandleEstimator::angle_divide_num_ [protected] |
Definition at line 99 of file handle_estimator.h.
double jsk_pcl_ros::HandleEstimator::approach_offset_ [protected] |
Definition at line 98 of file handle_estimator.h.
double jsk_pcl_ros::HandleEstimator::gripper_size_ [protected] |
Definition at line 97 of file handle_estimator.h.
boost::circular_buffer<boost::tuple<geometry_msgs::PoseArray, geometry_msgs::PoseArray> > jsk_pcl_ros::HandleEstimator::output_buf [protected] |
Definition at line 100 of file handle_estimator.h.
ros::Publisher jsk_pcl_ros::HandleEstimator::pub_ [protected] |
Definition at line 91 of file handle_estimator.h.
Definition at line 91 of file handle_estimator.h.
Definition at line 91 of file handle_estimator.h.
Definition at line 91 of file handle_estimator.h.
Definition at line 91 of file handle_estimator.h.
message_filters::Subscriber<jsk_recognition_msgs::BoundingBox> jsk_pcl_ros::HandleEstimator::sub_box_ [protected] |
Definition at line 95 of file handle_estimator.h.
Definition at line 92 of file handle_estimator.h.
message_filters::Subscriber<sensor_msgs::PointCloud2> jsk_pcl_ros::HandleEstimator::sub_input_ [protected] |
Definition at line 94 of file handle_estimator.h.
boost::shared_ptr<message_filters::Synchronizer<SyncPolicy> > jsk_pcl_ros::HandleEstimator::sync_ [protected] |
Definition at line 93 of file handle_estimator.h.
Definition at line 96 of file handle_estimator.h.
The documentation for this class was generated from the following files: