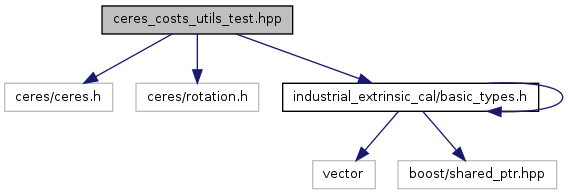
#include "ceres/ceres.h"#include "ceres/rotation.h"#include <industrial_extrinsic_cal/basic_types.h>
Include dependency graph for ceres_costs_utils_test.hpp:
Go to the source code of this file.
Namespaces | |
| namespace | industrial_extrinsic_cal |
Functions | |
| void | industrial_extrinsic_cal::printAAasEuler (double ax, double ay, double az) |
| print angle axis as euler angles | |
| void | industrial_extrinsic_cal::printAATasH (double ax, double ay, double az, double tx, double ty, double tz) |
| print an angle axis transform as a homogeneous transform | |
| void | industrial_extrinsic_cal::printAATasHI (double ax, double ay, double az, double tx, double ty, double tz) |
| print angle axis to homogeneous transform inverse | |
| void | industrial_extrinsic_cal::printCameraParameters (CameraParameters C, std::string words) |
| print Camera Parameters | |
| void | industrial_extrinsic_cal::printQTasH (double qx, double qy, double qz, double qw, double tx, double ty, double tz) |
| print a quaternion plus position as a homogeneous transform | |
| Observation | industrial_extrinsic_cal::projectPointNoDistortion (CameraParameters camera_params, Point3d point_to_project) |
| Observation | industrial_extrinsic_cal::projectPointWithDistortion (CameraParameters camera_parameters, Point3d point) |
| computes image of point in cameras image plane | |