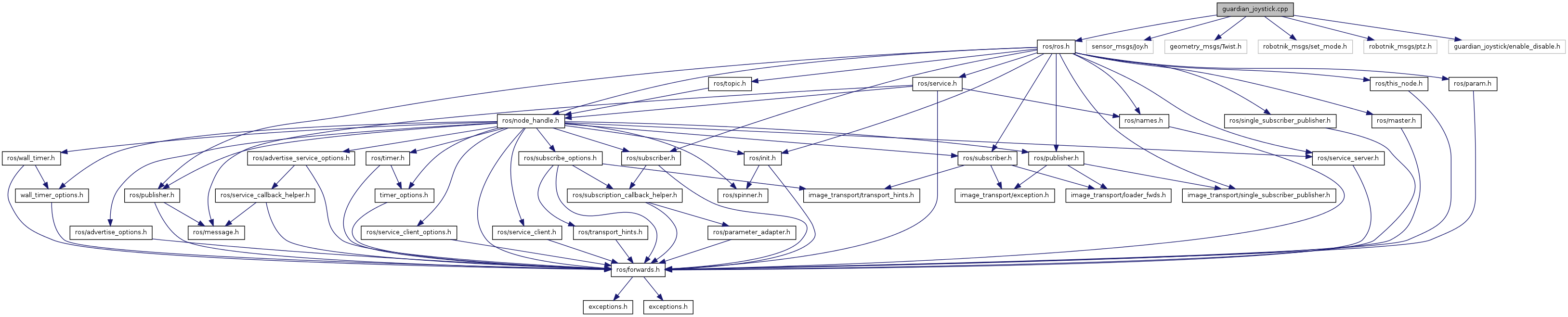
#include <ros/ros.h>#include <sensor_msgs/Joy.h>#include <geometry_msgs/Twist.h>#include <robotnik_msgs/set_mode.h>#include <robotnik_msgs/ptz.h>#include <guardian_joystick/enable_disable.h>
Include dependency graph for guardian_joystick.cpp:
Go to the source code of this file.
Classes | |
| class | GuardianJoy |
Defines | |
| #define | DEFAULT_AXIS_ANGULAR 2 |
| #define | DEFAULT_AXIS_LINEAR_X 1 |
| #define | DEFAULT_AXIS_LINEAR_Y 0 |
| #define | DEFAULT_AXIS_LINEAR_Z 3 |
| #define | DEFAULT_NUM_OF_BUTTONS 16 |
| #define | DEFAULT_SCALE_ANGULAR 2.0 |
| #define | DEFAULT_SCALE_LINEAR_X 1.0 |
| #define | DEFAULT_SCALE_LINEAR_Y 1.0 |
| #define | DEFAULT_SCALE_LINEAR_Z 1.0 |
| #define | NUM_BUTTONS 20 |
Functions | |
| int | main (int argc, char **argv) |
Define Documentation
| #define DEFAULT_AXIS_ANGULAR 2 |
Definition at line 46 of file guardian_joystick.cpp.
| #define DEFAULT_AXIS_LINEAR_X 1 |
Definition at line 43 of file guardian_joystick.cpp.
| #define DEFAULT_AXIS_LINEAR_Y 0 |
Definition at line 44 of file guardian_joystick.cpp.
| #define DEFAULT_AXIS_LINEAR_Z 3 |
Definition at line 45 of file guardian_joystick.cpp.
| #define DEFAULT_NUM_OF_BUTTONS 16 |
Definition at line 42 of file guardian_joystick.cpp.
| #define DEFAULT_SCALE_ANGULAR 2.0 |
Definition at line 50 of file guardian_joystick.cpp.
| #define DEFAULT_SCALE_LINEAR_X 1.0 |
Definition at line 47 of file guardian_joystick.cpp.
| #define DEFAULT_SCALE_LINEAR_Y 1.0 |
Definition at line 48 of file guardian_joystick.cpp.
| #define DEFAULT_SCALE_LINEAR_Z 1.0 |
Definition at line 49 of file guardian_joystick.cpp.
| #define NUM_BUTTONS 20 |
Definition at line 51 of file guardian_joystick.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 363 of file guardian_joystick.cpp.