#include <odometer_base.hpp>
Protected Member Functions | |
| const fovis::VisualOdometryOptions & | getOptions () const |
| OdometerBase () | |
| void | process (const sensor_msgs::ImageConstPtr &image_msg, const sensor_msgs::CameraInfoConstPtr &info_msg) |
| void | setDepthSource (fovis::DepthSource *source) |
| virtual | ~OdometerBase () |
Static Protected Member Functions | |
| static void | rosToFovis (const image_geometry::PinholeCameraModel &camera_model, fovis::CameraIntrinsicsParameters ¶meters) |
Private Member Functions | |
| void | eigenToTF (const Eigen::Isometry3d &pose, tf::Transform &transform) |
| void | getBaseToSensorTransform (const ros::Time &stamp, const std::string &sensor_frame_id, tf::StampedTransform &base_to_sensor) |
| void | initOdometer (const sensor_msgs::CameraInfoConstPtr &info_msg) |
| void | loadParams () |
Private Attributes | |
| std::string | base_link_frame_id_ |
| fovis::DepthSource * | depth_source_ |
| image_transport::Publisher | features_pub_ |
| ros::Publisher | info_pub_ |
| tf::StampedTransform | initial_base_to_sensor_ |
| image_transport::ImageTransport | it_ |
| ros::Time | last_time_ |
| ros::NodeHandle | nh_local_ |
| std::string | odom_frame_id_ |
| nav_msgs::Odometry | odom_msg_ |
| ros::Publisher | odom_pub_ |
| geometry_msgs::PoseStamped | pose_msg_ |
| ros::Publisher | pose_pub_ |
| bool | publish_tf_ |
| fovis::Rectification * | rectification_ |
| std::string | sensor_frame_id_ |
| tf::TransformBroadcaster | tf_broadcaster_ |
| tf::TransformListener | tf_listener_ |
| fovis::VisualOdometry * | visual_odometer_ |
| fovis::VisualOdometryOptions | visual_odometer_options_ |
Detailed Description
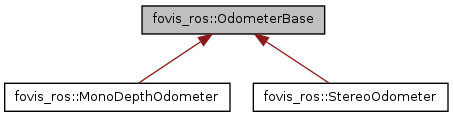
Base class for fovis odometers.
Definition at line 24 of file odometer_base.hpp.
Constructor & Destructor Documentation
| fovis_ros::OdometerBase::OdometerBase | ( | ) | [inline, protected] |
Definition at line 29 of file odometer_base.hpp.
| virtual fovis_ros::OdometerBase::~OdometerBase | ( | ) | [inline, protected, virtual] |
Definition at line 44 of file odometer_base.hpp.
Member Function Documentation
| void fovis_ros::OdometerBase::eigenToTF | ( | const Eigen::Isometry3d & | pose, |
| tf::Transform & | transform | ||
| ) | [inline, private] |
Definition at line 327 of file odometer_base.hpp.
| void fovis_ros::OdometerBase::getBaseToSensorTransform | ( | const ros::Time & | stamp, |
| const std::string & | sensor_frame_id, | ||
| tf::StampedTransform & | base_to_sensor | ||
| ) | [inline, private] |
Definition at line 304 of file odometer_base.hpp.
| const fovis::VisualOdometryOptions& fovis_ros::OdometerBase::getOptions | ( | ) | const [inline, protected] |
Definition at line 50 of file odometer_base.hpp.
| void fovis_ros::OdometerBase::initOdometer | ( | const sensor_msgs::CameraInfoConstPtr & | info_msg | ) | [inline, private] |
Initializes the visual odometry.
Definition at line 242 of file odometer_base.hpp.
| void fovis_ros::OdometerBase::loadParams | ( | ) | [inline, private] |
Loads parameters from ROS node handle into members.
Definition at line 277 of file odometer_base.hpp.
| void fovis_ros::OdometerBase::process | ( | const sensor_msgs::ImageConstPtr & | image_msg, |
| const sensor_msgs::CameraInfoConstPtr & | info_msg | ||
| ) | [inline, protected] |
To be called by implementing classes after the depth source has been fed with data.
Definition at line 78 of file odometer_base.hpp.
| static void fovis_ros::OdometerBase::rosToFovis | ( | const image_geometry::PinholeCameraModel & | camera_model, |
| fovis::CameraIntrinsicsParameters & | parameters | ||
| ) | [inline, static, protected] |
Definition at line 63 of file odometer_base.hpp.
| void fovis_ros::OdometerBase::setDepthSource | ( | fovis::DepthSource * | source | ) | [inline, protected] |
Sets the depth source, must be called once before calling process()
Definition at line 58 of file odometer_base.hpp.
Member Data Documentation
std::string fovis_ros::OdometerBase::base_link_frame_id_ [private] |
Definition at line 350 of file odometer_base.hpp.
fovis::DepthSource* fovis_ros::OdometerBase::depth_source_ [private] |
Definition at line 342 of file odometer_base.hpp.
Definition at line 366 of file odometer_base.hpp.
Definition at line 365 of file odometer_base.hpp.
Definition at line 352 of file odometer_base.hpp.
Definition at line 367 of file odometer_base.hpp.
ros::Time fovis_ros::OdometerBase::last_time_ [private] |
Definition at line 345 of file odometer_base.hpp.
Definition at line 360 of file odometer_base.hpp.
std::string fovis_ros::OdometerBase::odom_frame_id_ [private] |
Definition at line 349 of file odometer_base.hpp.
nav_msgs::Odometry fovis_ros::OdometerBase::odom_msg_ [private] |
Definition at line 357 of file odometer_base.hpp.
Definition at line 363 of file odometer_base.hpp.
geometry_msgs::PoseStamped fovis_ros::OdometerBase::pose_msg_ [private] |
Definition at line 358 of file odometer_base.hpp.
Definition at line 364 of file odometer_base.hpp.
bool fovis_ros::OdometerBase::publish_tf_ [private] |
Definition at line 351 of file odometer_base.hpp.
fovis::Rectification* fovis_ros::OdometerBase::rectification_ [private] |
Definition at line 341 of file odometer_base.hpp.
std::string fovis_ros::OdometerBase::sensor_frame_id_ [private] |
Definition at line 348 of file odometer_base.hpp.
Definition at line 354 of file odometer_base.hpp.
Definition at line 353 of file odometer_base.hpp.
fovis::VisualOdometry* fovis_ros::OdometerBase::visual_odometer_ [private] |
Definition at line 340 of file odometer_base.hpp.
fovis::VisualOdometryOptions fovis_ros::OdometerBase::visual_odometer_options_ [private] |
Definition at line 343 of file odometer_base.hpp.
The documentation for this class was generated from the following file: