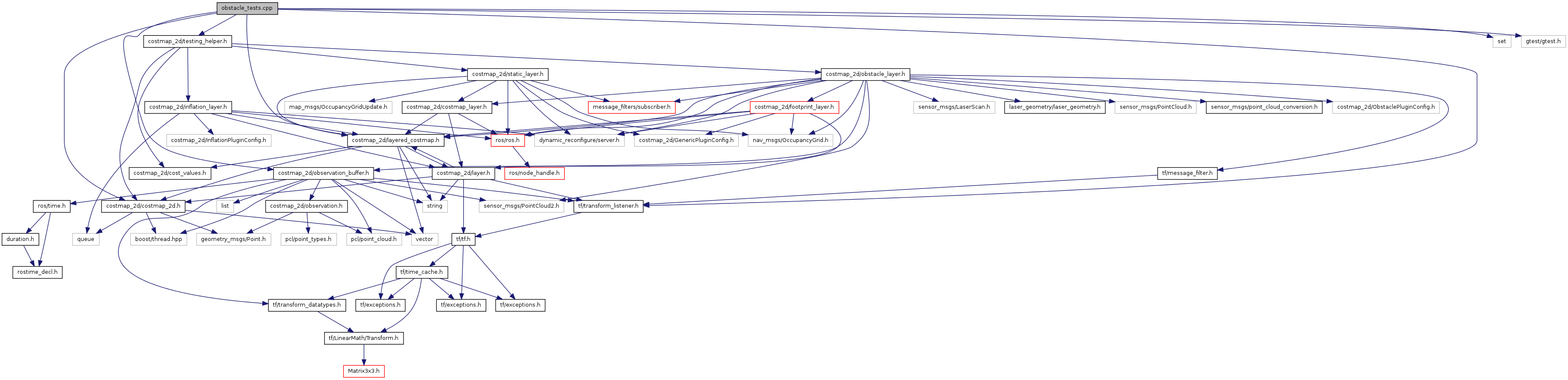
#include <costmap_2d/costmap_2d.h>#include <costmap_2d/layered_costmap.h>#include <costmap_2d/observation_buffer.h>#include <costmap_2d/testing_helper.h>#include <set>#include <gtest/gtest.h>#include <tf/transform_listener.h>
Include dependency graph for obstacle_tests.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| TEST (costmap, testRaytracing) | |
| TEST (costmap, testRaytracing2) | |
| TEST (costmap, testWaveInterference) | |
| TEST (costmap, testZThreshold) | |
| TEST (costmap, testDynamicObstacles) | |
| TEST (costmap, testMultipleAdditions) | |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 248 of file obstacle_tests.cpp.
| TEST | ( | costmap | , |
| testRaytracing | |||
| ) |
Test for ray tracing free space
Definition at line 74 of file obstacle_tests.cpp.
| TEST | ( | costmap | , |
| testRaytracing2 | |||
| ) |
Test for ray tracing free space
Definition at line 97 of file obstacle_tests.cpp.
| TEST | ( | costmap | , |
| testWaveInterference | |||
| ) |
Test for wave interference
Definition at line 153 of file obstacle_tests.cpp.
| TEST | ( | costmap | , |
| testZThreshold | |||
| ) |
Make sure we ignore points outside of our z threshold
Definition at line 182 of file obstacle_tests.cpp.
| TEST | ( | costmap | , |
| testDynamicObstacles | |||
| ) |
Verify that dynamic obstacles are added
Definition at line 204 of file obstacle_tests.cpp.
| TEST | ( | costmap | , |
| testMultipleAdditions | |||
| ) |
Verify that if we add a point that is already a static obstacle we do not end up with a new ostacle
Definition at line 230 of file obstacle_tests.cpp.