Interface for configuring a SharedContext object and its associated solvers. More...
#include <solver_strategies.h>
Public Types | |
| typedef ContextParams | CtxOpts |
| typedef SolveParams | SearchOpts |
| typedef SolverParams | SolverOpts |
Public Member Functions | |
| virtual bool | addPost (Solver &s) const |
| Adds post propagators to the given solver. | |
| virtual const CtxOpts & | context () const =0 |
| Returns the options for the shared context. | |
| virtual DecisionHeuristic * | heuristic (uint32 i) const =0 |
| Returns the heuristic to be used in the i'th solver. | |
| virtual uint32 | numSearch () const =0 |
| Returns the number of search options in this config. | |
| virtual uint32 | numSolver () const =0 |
| Returns the number of solver options in this config. | |
| virtual void | prepare (SharedContext &)=0 |
| Prepares this configuration for the usage in the given context. | |
| virtual const SearchOpts & | search (uint32 i) const =0 |
| Returns the search options for the i'th solver of the SharedContext. | |
| virtual const SolverOpts & | solver (uint32 i) const =0 |
| Returns the solver options for the i'th solver to be attached to the SharedContext. | |
| virtual | ~Configuration () |
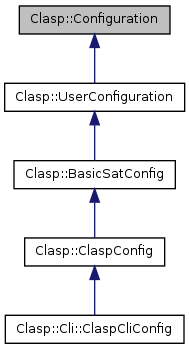
Detailed Description
Interface for configuring a SharedContext object and its associated solvers.
Definition at line 387 of file solver_strategies.h.
Member Typedef Documentation
Definition at line 391 of file solver_strategies.h.
Definition at line 390 of file solver_strategies.h.
Definition at line 389 of file solver_strategies.h.
Constructor & Destructor Documentation
| Clasp::Configuration::~Configuration | ( | ) | [virtual] |
Definition at line 230 of file solver_strategies.cpp.
Member Function Documentation
| bool Clasp::Configuration::addPost | ( | Solver & | s | ) | const [virtual] |
Adds post propagators to the given solver.
The function is called during initialization of s. The default implementation adds a post propagator for unfounded set checking if necessary.
Reimplemented in Clasp::UserConfiguration.
Definition at line 231 of file solver_strategies.cpp.
| virtual const CtxOpts& Clasp::Configuration::context | ( | ) | const [pure virtual] |
Returns the options for the shared context.
Implemented in Clasp::BasicSatConfig.
| virtual DecisionHeuristic* Clasp::Configuration::heuristic | ( | uint32 | i | ) | const [pure virtual] |
Returns the heuristic to be used in the i'th solver.
The function is called in Solver::startInit().
- Note:
- The returned object is owned by the caller.
Implemented in Clasp::BasicSatConfig.
| virtual uint32 Clasp::Configuration::numSearch | ( | ) | const [pure virtual] |
Returns the number of search options in this config.
Implemented in Clasp::BasicSatConfig.
| virtual uint32 Clasp::Configuration::numSolver | ( | ) | const [pure virtual] |
Returns the number of solver options in this config.
Implemented in Clasp::BasicSatConfig.
| virtual void Clasp::Configuration::prepare | ( | SharedContext & | ) | [pure virtual] |
Prepares this configuration for the usage in the given context.
Implemented in Clasp::BasicSatConfig, and Clasp::ClaspConfig.
| virtual const SearchOpts& Clasp::Configuration::search | ( | uint32 | i | ) | const [pure virtual] |
Returns the search options for the i'th solver of the SharedContext.
Implemented in Clasp::BasicSatConfig.
| virtual const SolverOpts& Clasp::Configuration::solver | ( | uint32 | i | ) | const [pure virtual] |
Returns the solver options for the i'th solver to be attached to the SharedContext.
Implemented in Clasp::BasicSatConfig.
The documentation for this class was generated from the following files: