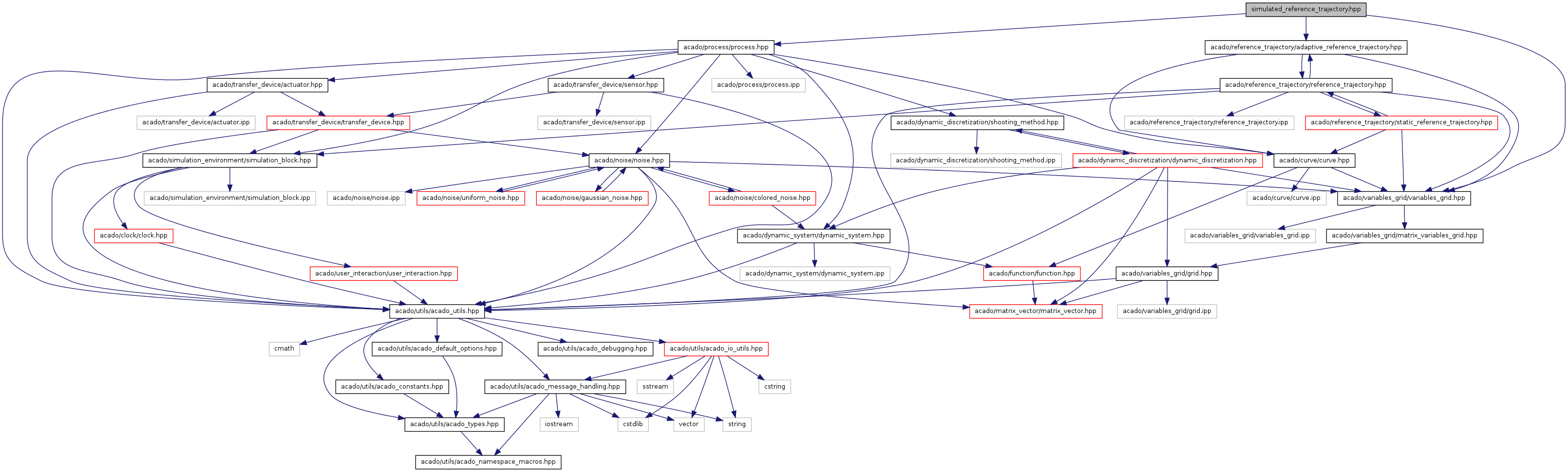
#include <acado/variables_grid/variables_grid.hpp>#include <acado/process/process.hpp>#include <acado/reference_trajectory/adaptive_reference_trajectory.hpp>
Include dependency graph for simulated_reference_trajectory.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | SimulatedReferenceTrajectory |
| Allows to define a simulated reference trajectory that the ControlLaw aims to track. More... | |