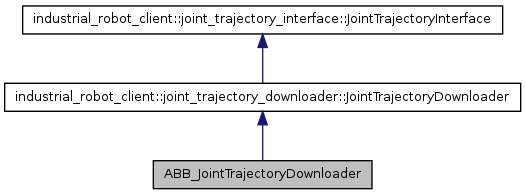
Inheritance diagram for ABB_JointTrajectoryDownloader:
Public Member Functions | |
| bool | calc_velocity (const trajectory_msgs::JointTrajectoryPoint &pt, double *rbt_velocity) |
| bool | init (std::string default_ip="", int default_port=StandardSocketPorts::MOTION) |
| bool | transform (const trajectory_msgs::JointTrajectoryPoint &pt_in, trajectory_msgs::JointTrajectoryPoint *pt_out) |
Private Attributes | |
| bool | J23_coupled_ |
Detailed Description
Definition at line 39 of file abb_joint_downloader_node.cpp.
Member Function Documentation
| bool ABB_JointTrajectoryDownloader::calc_velocity | ( | const trajectory_msgs::JointTrajectoryPoint & | pt, |
| double * | rbt_velocity | ||
| ) | [inline, virtual] |
Reimplemented from industrial_robot_client::joint_trajectory_interface::JointTrajectoryInterface.
Definition at line 68 of file abb_joint_downloader_node.cpp.
| bool ABB_JointTrajectoryDownloader::init | ( | std::string | default_ip = "", |
| int | default_port = StandardSocketPorts::MOTION |
||
| ) | [inline, virtual] |
Reimplemented from industrial_robot_client::joint_trajectory_interface::JointTrajectoryInterface.
Definition at line 46 of file abb_joint_downloader_node.cpp.
| bool ABB_JointTrajectoryDownloader::transform | ( | const trajectory_msgs::JointTrajectoryPoint & | pt_in, |
| trajectory_msgs::JointTrajectoryPoint * | pt_out | ||
| ) | [inline, virtual] |
Reimplemented from industrial_robot_client::joint_trajectory_interface::JointTrajectoryInterface.
Definition at line 59 of file abb_joint_downloader_node.cpp.
Member Data Documentation
bool ABB_JointTrajectoryDownloader::J23_coupled_ [private] |
Definition at line 43 of file abb_joint_downloader_node.cpp.
The documentation for this class was generated from the following file: