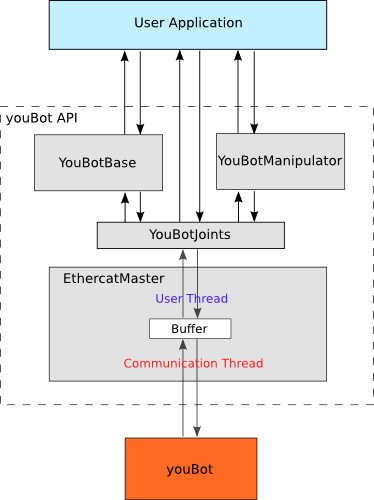
This figure shows the rough architectural overview of the youBot API. The arrows are indicating the data flow. As depicted there is a separate communication thread to handle the EtherCAT communication. The data transfer between the user thread and the communication thread is done by a non blocking buffer. The default value for the cycle time of the communication thread is 1 ms. The threading is totally encapsulated in the youbot::EthercatMaster class. The youbot:YouBotJoint class uses the youbot::EthercatMaster class to send and receive information from the youBot.
It is also possible to switch off the communication thread of the EtherCAT master. In this case the user has to call the youbot::EthercatMasterInterface methods sendProcessData() and receiveProcessData() to trigger the process data communication. To deactivate the thread the user has to set the parameter "ethercatMasterWithThread" in the youbot::EthercatMaster::getInstance() method to false. This have to be done before creating a youbot::YouBotBase or youbot::YouBotManipulator object and before any other access to a youbot::EthercatMaster.