This is the main class for accessing the data from the tactiles. More...
#include "sr_robot_lib/generic_tactiles.hpp"#include <sr_utilities/sr_math_utils.hpp>#include <cctype>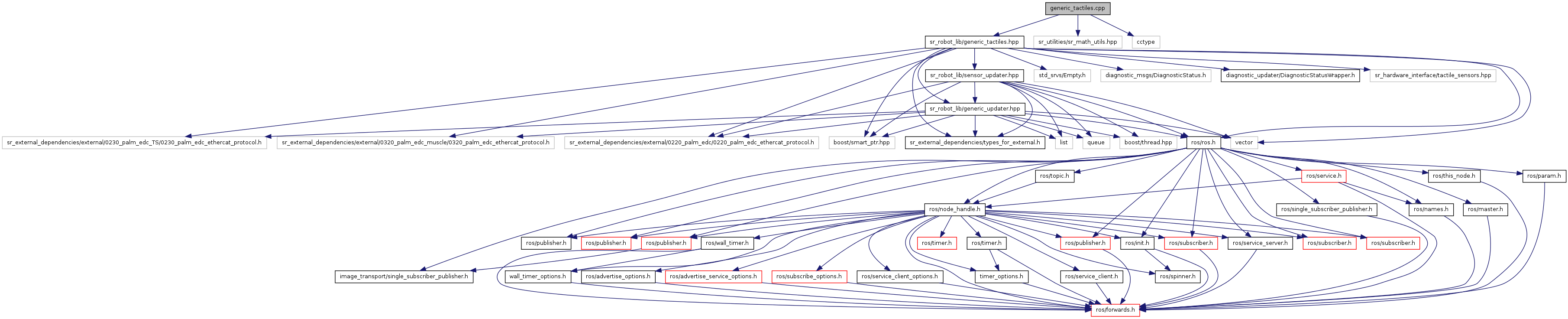
Go to the source code of this file.
Namespaces | |
| namespace | tactiles |
Defines | |
| #define | TACTILE_DATA_LENGTH_BYTES TACTILE_DATA_LENGTH_BYTES_v1 |
Detailed Description
This is the main class for accessing the data from the tactiles.
- Date:
- Th Oct 20 10:06:14 2011
Copyright 2011 Shadow Robot Company Ltd.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see <http://www.gnu.org/licenses/>.
Definition in file generic_tactiles.cpp.
Define Documentation
| #define TACTILE_DATA_LENGTH_BYTES TACTILE_DATA_LENGTH_BYTES_v1 |
Definition at line 35 of file generic_tactiles.cpp.