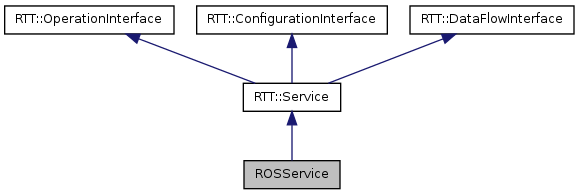
Inheritance diagram for ROSService:
Public Member Functions | |
| ROSService (TaskContext *owner) | |
| ConnPolicy | topic (const std::string &name) |
| ConnPolicy | topicBuffer (const std::string &name, int size) |
| ConnPolicy | topicUnbuffered (const std::string &name) |
Public Attributes | |
| int | protocol_id |
Detailed Description
The globally loadable ROS service.
Definition at line 12 of file rtt_ros_service.cpp.
Constructor & Destructor Documentation
| ROSService::ROSService | ( | TaskContext * | owner | ) | [inline] |
Instantiates this service.
- Parameters:
-
owner The owner or null in case of global.
Definition at line 19 of file rtt_ros_service.cpp.
Member Function Documentation
| ConnPolicy ROSService::topic | ( | const std::string & | name | ) | [inline] |
Returns a ConnPolicy object for streaming to or from the given ROS topic. No buffering is done.
Definition at line 35 of file rtt_ros_service.cpp.
| ConnPolicy ROSService::topicBuffer | ( | const std::string & | name, |
| int | size | ||
| ) | [inline] |
Returns a ConnPolicy object for streaming to or from the given ROS topic. Also specifies the buffer size of the connection to be created.
Definition at line 47 of file rtt_ros_service.cpp.
| ConnPolicy ROSService::topicUnbuffered | ( | const std::string & | name | ) | [inline] |
Returns a ConnPolicy object for streaming to or from the given ROS topic. Also specifies the buffer size of the connection to be created.
Definition at line 59 of file rtt_ros_service.cpp.
Member Data Documentation
Definition at line 14 of file rtt_ros_service.cpp.
The documentation for this class was generated from the following file: