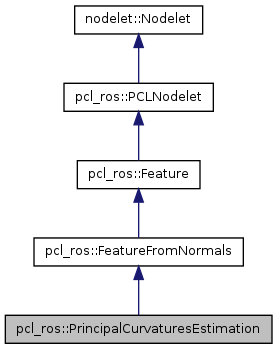
PrincipalCurvaturesEstimation estimates the directions (eigenvectors) and magnitudes (eigenvalues) of principal surface curvatures for a given point cloud dataset containing points and normals. More...
#include <principal_curvatures.h>
Private Types | |
| typedef pcl::PointCloud < pcl::PrincipalCurvatures > | PointCloudOut |
Private Member Functions | |
| bool | childInit (ros::NodeHandle &nh) |
| Child initialization routine. Internal method. | |
| void | computePublish (const PointCloudInConstPtr &cloud, const PointCloudNConstPtr &normals, const PointCloudInConstPtr &surface, const IndicesPtr &indices) |
| Compute the feature and publish it. | |
| void | emptyPublish (const PointCloudInConstPtr &cloud) |
| Publish an empty point cloud of the feature output type. | |
Private Attributes | |
| pcl::PrincipalCurvaturesEstimation < pcl::PointXYZ, pcl::Normal, pcl::PrincipalCurvatures > | impl_ |
Detailed Description
PrincipalCurvaturesEstimation estimates the directions (eigenvectors) and magnitudes (eigenvalues) of principal surface curvatures for a given point cloud dataset containing points and normals.
- Note:
- The code is stateful as we do not expect this class to be multicore parallelized. Please look at NormalEstimationOpenMP and NormalEstimationTBB for examples on how to extend this to parallel implementations.
Definition at line 54 of file principal_curvatures.h.
Member Typedef Documentation
typedef pcl::PointCloud<pcl::PrincipalCurvatures> pcl_ros::PrincipalCurvaturesEstimation::PointCloudOut [private] |
Definition at line 59 of file principal_curvatures.h.
Member Function Documentation
| bool pcl_ros::PrincipalCurvaturesEstimation::childInit | ( | ros::NodeHandle & | nh | ) | [inline, private, virtual] |
Child initialization routine. Internal method.
Implements pcl_ros::FeatureFromNormals.
Definition at line 63 of file principal_curvatures.h.
| void pcl_ros::PrincipalCurvaturesEstimation::computePublish | ( | const PointCloudInConstPtr & | cloud, |
| const PointCloudNConstPtr & | normals, | ||
| const PointCloudInConstPtr & | surface, | ||
| const IndicesPtr & | indices | ||
| ) | [private, virtual] |
Compute the feature and publish it.
Implements pcl_ros::FeatureFromNormals.
Definition at line 50 of file features/principal_curvatures.cpp.
| void pcl_ros::PrincipalCurvaturesEstimation::emptyPublish | ( | const PointCloudInConstPtr & | cloud | ) | [private, virtual] |
Publish an empty point cloud of the feature output type.
Implements pcl_ros::FeatureFromNormals.
Definition at line 42 of file features/principal_curvatures.cpp.
Member Data Documentation
pcl::PrincipalCurvaturesEstimation<pcl::PointXYZ, pcl::Normal, pcl::PrincipalCurvatures> pcl_ros::PrincipalCurvaturesEstimation::impl_ [private] |
Definition at line 57 of file principal_curvatures.h.
The documentation for this class was generated from the following files: