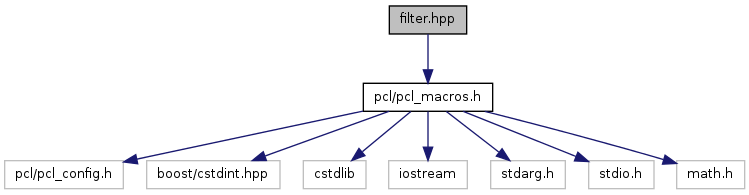
#include <pcl/pcl_macros.h>
Include dependency graph for filter.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Defines | |
| #define | PCL_INSTANTIATE_removeNanFromPointCloud(T) template PCL_EXPORTS void pcl::removeNaNFromPointCloud<T>(const pcl::PointCloud<T>&, pcl::PointCloud<T>&, std::vector<int>&); |
Define Documentation
| #define PCL_INSTANTIATE_removeNanFromPointCloud | ( | T | ) | template PCL_EXPORTS void pcl::removeNaNFromPointCloud<T>(const pcl::PointCloud<T>&, pcl::PointCloud<T>&, std::vector<int>&); |
Definition at line 91 of file filter.hpp.