#include <transformation_estimation_point_to_plane.h>
Public Types | |
| typedef pcl::PointCloud < PointSource > | PointCloudSource |
| typedef PointCloudSource::ConstPtr | PointCloudSourceConstPtr |
| typedef PointCloudSource::Ptr | PointCloudSourcePtr |
| typedef pcl::PointCloud < PointTarget > | PointCloudTarget |
| typedef PointIndices::ConstPtr | PointIndicesConstPtr |
| typedef PointIndices::Ptr | PointIndicesPtr |
| typedef boost::shared_ptr < TransformationEstimationPointToPlane < PointSource, PointTarget > > | Ptr |
Public Member Functions | |
| TransformationEstimationPointToPlane () | |
| virtual | ~TransformationEstimationPointToPlane () |
Protected Member Functions | |
| virtual double | computeDistance (const PointSource &p_src, const PointTarget &p_tgt) |
| Compute the distance between a source point and its corresponding target point. | |
Detailed Description
template<typename PointSource, typename PointTarget>
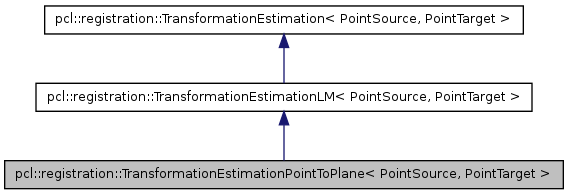
class pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >
TransformationEstimationPointToPlane uses Levenberg Marquardt optimization to find the transformation that minimizes the point-to-plane distance between the given correspondences.
Definition at line 57 of file transformation_estimation_point_to_plane.h.
Member Typedef Documentation
| typedef pcl::PointCloud<PointSource> pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::PointCloudSource |
Reimplemented from pcl::registration::TransformationEstimationLM< PointSource, PointTarget >.
Definition at line 61 of file transformation_estimation_point_to_plane.h.
| typedef PointCloudSource::ConstPtr pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::PointCloudSourceConstPtr |
Reimplemented from pcl::registration::TransformationEstimationLM< PointSource, PointTarget >.
Definition at line 63 of file transformation_estimation_point_to_plane.h.
| typedef PointCloudSource::Ptr pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::PointCloudSourcePtr |
Reimplemented from pcl::registration::TransformationEstimationLM< PointSource, PointTarget >.
Definition at line 62 of file transformation_estimation_point_to_plane.h.
| typedef pcl::PointCloud<PointTarget> pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::PointCloudTarget |
Reimplemented from pcl::registration::TransformationEstimationLM< PointSource, PointTarget >.
Definition at line 64 of file transformation_estimation_point_to_plane.h.
| typedef PointIndices::ConstPtr pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::PointIndicesConstPtr |
Reimplemented from pcl::registration::TransformationEstimationLM< PointSource, PointTarget >.
Definition at line 66 of file transformation_estimation_point_to_plane.h.
| typedef PointIndices::Ptr pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::PointIndicesPtr |
Reimplemented from pcl::registration::TransformationEstimationLM< PointSource, PointTarget >.
Definition at line 65 of file transformation_estimation_point_to_plane.h.
| typedef boost::shared_ptr<TransformationEstimationPointToPlane<PointSource, PointTarget> > pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::Ptr |
Reimplemented from pcl::registration::TransformationEstimation< PointSource, PointTarget >.
Definition at line 60 of file transformation_estimation_point_to_plane.h.
Constructor & Destructor Documentation
| pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::TransformationEstimationPointToPlane | ( | ) | [inline] |
Definition at line 69 of file transformation_estimation_point_to_plane.h.
| virtual pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::~TransformationEstimationPointToPlane | ( | ) | [inline, virtual] |
Definition at line 70 of file transformation_estimation_point_to_plane.h.
Member Function Documentation
| virtual double pcl::registration::TransformationEstimationPointToPlane< PointSource, PointTarget >::computeDistance | ( | const PointSource & | p_src, |
| const PointTarget & | p_tgt | ||
| ) | [inline, protected, virtual] |
Compute the distance between a source point and its corresponding target point.
- Parameters:
-
[in] p_src The source point [in] p_tgt The target point
- Returns:
- The distance between p_src and p_tgt
- Note:
- A different distance function can be defined by creating a subclass of TransformationEstimationLM and overriding this method. (See TransformationEstimationPointToPlane)
Reimplemented from pcl::registration::TransformationEstimationLM< PointSource, PointTarget >.
Definition at line 74 of file transformation_estimation_point_to_plane.h.
The documentation for this class was generated from the following file: