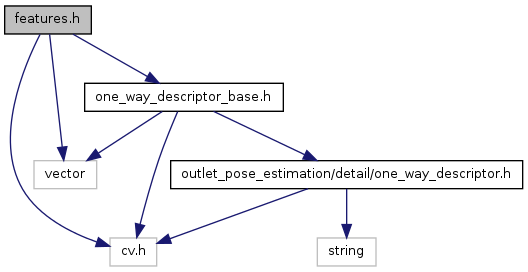
Include dependency graph for features.h:
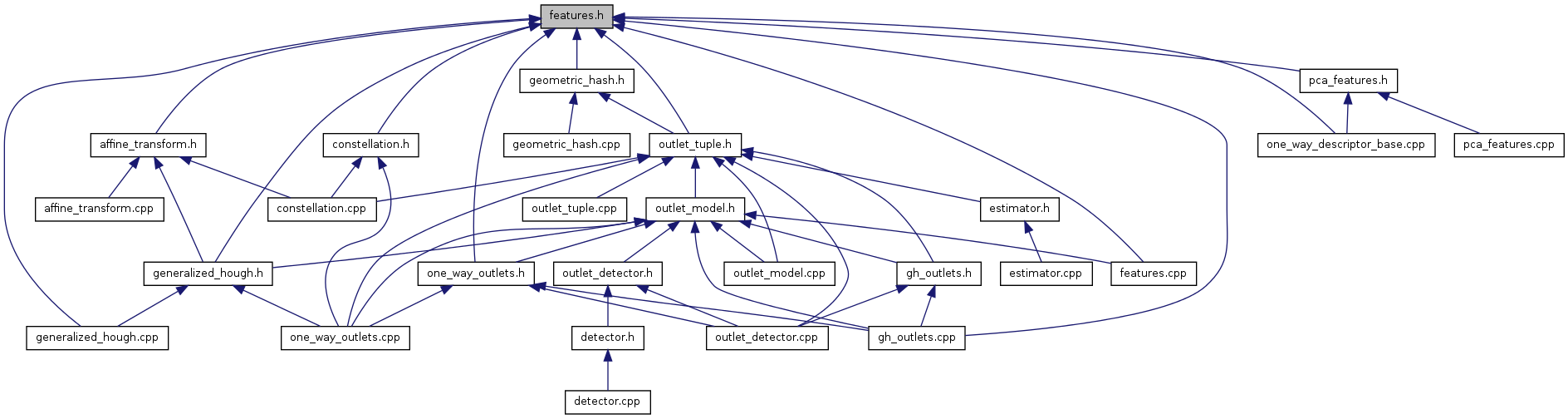
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| void | ApplyGamma (IplImage *img, float gamma=4.0f) |
| void | DrawFeatures (IplImage *img, const std::vector< feature_t > &features) |
| void | FilterFeatures (std::vector< feature_t > &features, float min_scale, float max_scale) |
| void | FilterFeaturesOnEdges (const IplImage *img, const std::vector< feature_t > &src_features, std::vector< feature_t > &dst_features, int max_edge_dist=5, int min_contour_size=15) |
| void | GetHarrisFeatures (IplImage *src, std::vector< feature_t > &features) |
| void | GetHoleFeatures (IplImage *src, std::vector< feature_t > &features, float hole_contrast=1.1f) |
| void | GetStarFeatures (IplImage *src, std::vector< feature_t > &features) |
| void | GetSURFFeatures (IplImage *src, std::vector< feature_t > &features) |
| float | length (CvPoint p) |
| float | length (cv::Point2f p) |
| int | LoadFeatures (const char *filename, std::vector< std::vector< feature_t > > &features, std::vector< IplImage * > &images) |
| IplImage * | loadImageRed (const char *filename) |
| void | LoadTrainingFeatures (CvOneWayDescriptorObject &descriptors, const char *train_image_filename_object, const char *train_image_filename_background) |
| CvPoint | operator- (CvPoint p1, CvPoint p2) |
| cv::Point2f | operator- (cv::Point2f p1, cv::Point2f p2) |
| cv::Point2f | operator- (cv::Point2f p1, CvPoint p2) |
| cv::Point2f | operator- (CvPoint p1, cv::Point2f p2) |
| void | ScaleFeatures (const std::vector< feature_t > &src, std::vector< feature_t > &dst, float scale) |
| void | SelectNeighborFeatures (std::vector< feature_t > &features, const std::vector< feature_t > &voc) |
Function Documentation
| void ApplyGamma | ( | IplImage * | img, |
| float | gamma = 4.0f |
||
| ) |
Definition at line 296 of file features.cpp.
| void DrawFeatures | ( | IplImage * | img, |
| const std::vector< feature_t > & | features | ||
| ) |
| void FilterFeatures | ( | std::vector< feature_t > & | features, |
| float | min_scale, | ||
| float | max_scale | ||
| ) |
| void FilterFeaturesOnEdges | ( | const IplImage * | img, |
| const std::vector< feature_t > & | src_features, | ||
| std::vector< feature_t > & | dst_features, | ||
| int | max_edge_dist = 5, |
||
| int | min_contour_size = 15 |
||
| ) |
| void GetHarrisFeatures | ( | IplImage * | src, |
| std::vector< feature_t > & | features | ||
| ) |
| void GetHoleFeatures | ( | IplImage * | src, |
| std::vector< feature_t > & | features, | ||
| float | hole_contrast = 1.1f |
||
| ) |
| void GetStarFeatures | ( | IplImage * | src, |
| std::vector< feature_t > & | features | ||
| ) |
| void GetSURFFeatures | ( | IplImage * | src, |
| std::vector< feature_t > & | features | ||
| ) |
| float length | ( | CvPoint | p | ) | [inline] |
Definition at line 23 of file features.h.
| float length | ( | cv::Point2f | p | ) | [inline] |
Definition at line 43 of file features.h.
| int LoadFeatures | ( | const char * | filename, |
| std::vector< std::vector< feature_t > > & | features, | ||
| std::vector< IplImage * > & | images | ||
| ) |
| IplImage* loadImageRed | ( | const char * | filename | ) |
Definition at line 177 of file features.cpp.
| void LoadTrainingFeatures | ( | CvOneWayDescriptorObject & | descriptors, |
| const char * | train_image_filename_object, | ||
| const char * | train_image_filename_background | ||
| ) |
Definition at line 203 of file features.cpp.
| CvPoint operator- | ( | CvPoint | p1, |
| CvPoint | p2 | ||
| ) | [inline] |
Definition at line 18 of file features.h.
| cv::Point2f operator- | ( | cv::Point2f | p1, |
| cv::Point2f | p2 | ||
| ) | [inline] |
Definition at line 28 of file features.h.
| cv::Point2f operator- | ( | cv::Point2f | p1, |
| CvPoint | p2 | ||
| ) | [inline] |
Definition at line 33 of file features.h.
| cv::Point2f operator- | ( | CvPoint | p1, |
| cv::Point2f | p2 | ||
| ) | [inline] |
Definition at line 38 of file features.h.
| void ScaleFeatures | ( | const std::vector< feature_t > & | src, |
| std::vector< feature_t > & | dst, | ||
| float | scale | ||
| ) |
| void SelectNeighborFeatures | ( | std::vector< feature_t > & | features, |
| const std::vector< feature_t > & | voc | ||
| ) |