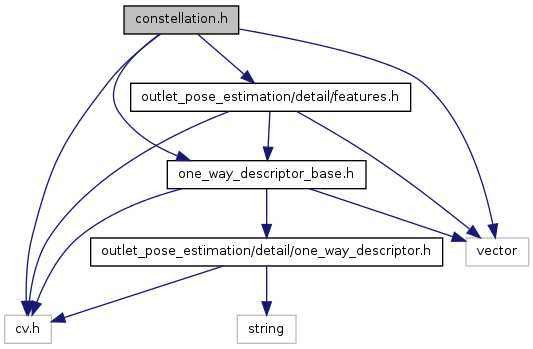
#include <vector>#include <cv.h>#include "outlet_pose_estimation/detail/features.h"#include "outlet_pose_estimation/detail/one_way_descriptor_base.h"
Include dependency graph for constellation.h:
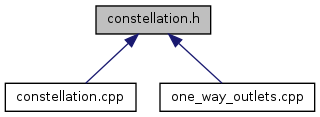
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| float | calc_set_std (const std::vector< feature_t > &features, const std::vector< int > &indices=std::vector< int >()) |
| void | ClusterOutletFeatures (const std::vector< feature_t > &src_features, std::vector< feature_t > &clusters, float max_dist) |
| void | DetectObjectConstellation (const std::vector< feature_t > &train, const std::vector< feature_t > &input, CvMat *homography, std::vector< int > &indices) |
| void | FilterOutletFeatures (const std::vector< feature_t > &src_features, std::vector< feature_t > &dst_features, float max_dist) |
| void | FilterOutletFeatures (const std::vector< feature_t > &src_features, std::vector< feature_t > &dst_features, std::vector< int > &dst_indexes, float max_dist) |
| void | InferMissingObjects (const std::vector< feature_t > &train, const std::vector< feature_t > &input, CvMat *homography, const std::vector< int > &indices, std::vector< feature_t > &full) |
| void | SelectNeighborFeatures (const std::vector< feature_t > &src_features, CvPoint center, std::vector< feature_t > &dst_features, float max_dist) |
Function Documentation
| float calc_set_std | ( | const std::vector< feature_t > & | features, |
| const std::vector< int > & | indices = std::vector< int >() |
||
| ) |
| void ClusterOutletFeatures | ( | const std::vector< feature_t > & | src_features, |
| std::vector< feature_t > & | clusters, | ||
| float | max_dist | ||
| ) |
| void DetectObjectConstellation | ( | const std::vector< feature_t > & | train, |
| const std::vector< feature_t > & | input, | ||
| CvMat * | homography, | ||
| std::vector< int > & | indices | ||
| ) |
| void FilterOutletFeatures | ( | const std::vector< feature_t > & | src_features, |
| std::vector< feature_t > & | dst_features, | ||
| float | max_dist | ||
| ) |
| void FilterOutletFeatures | ( | const std::vector< feature_t > & | src_features, |
| std::vector< feature_t > & | dst_features, | ||
| std::vector< int > & | dst_indexes, | ||
| float | max_dist | ||
| ) |
| void InferMissingObjects | ( | const std::vector< feature_t > & | train, |
| const std::vector< feature_t > & | input, | ||
| CvMat * | homography, | ||
| const std::vector< int > & | indices, | ||
| std::vector< feature_t > & | full | ||
| ) |
| void SelectNeighborFeatures | ( | const std::vector< feature_t > & | src_features, |
| CvPoint | center, | ||
| std::vector< feature_t > & | dst_features, | ||
| float | max_dist | ||
| ) |