Test program for inverse position kinematics. More...
#include <iostream>#include <frames_io.hpp>#include <models.hpp>#include <chainiksolverpos_lma.hpp>#include <chainfksolverpos_recursive.hpp>#include <boost/timer.hpp>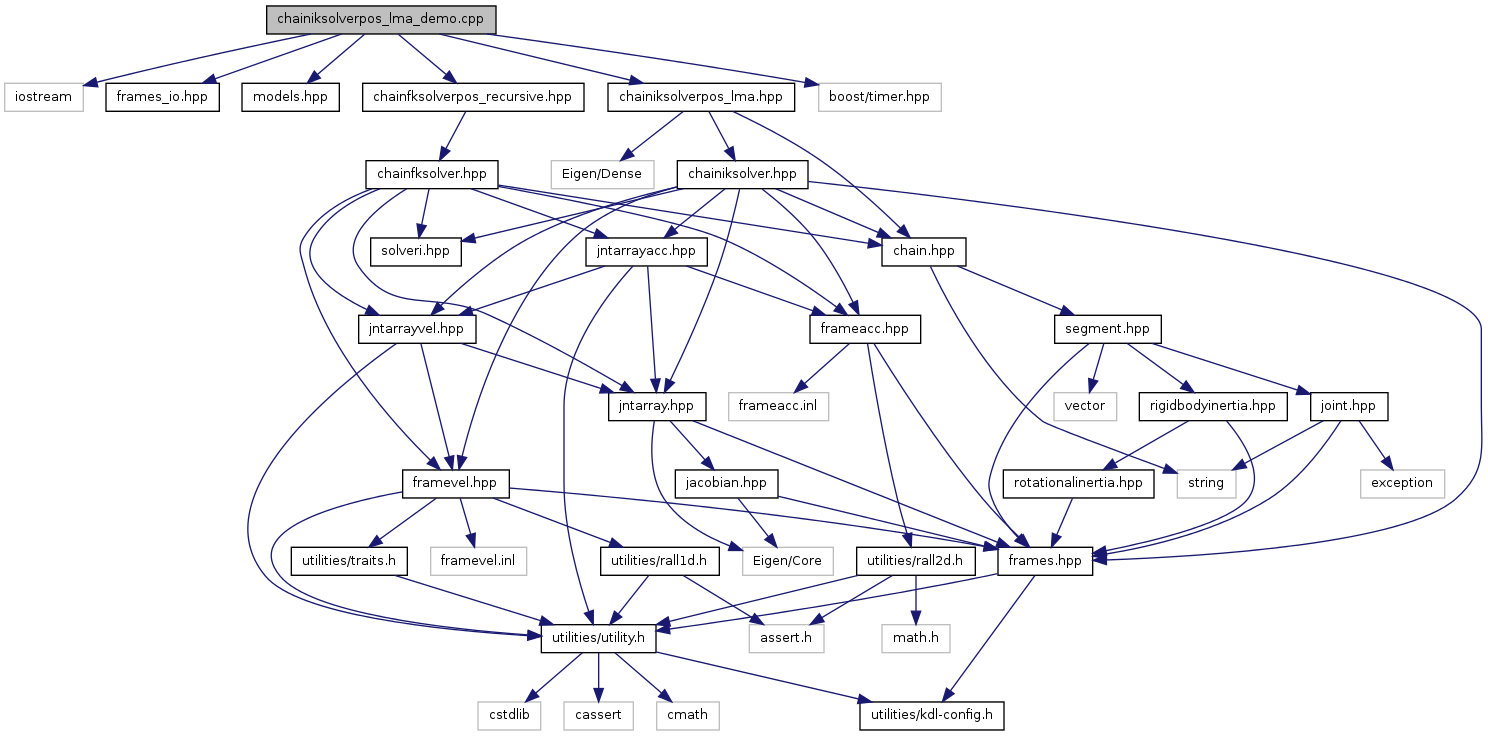
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
| void | test_inverseposkin (KDL::Chain &chain) |
Detailed Description
Test program for inverse position kinematics.
results with 1 million inv pos kin. #times successful 999992 #times -1 result 0 #times -2 result 5 #times -3 result 3 average number of iter 16.6437 min. nr of iter 13 max. nr of iter 500 min. difference after solving 3.86952e-12 max. difference after solving 4.79339e-05 min. trans. difference after solving 3.86952e-12 max. trans. difference after solving 4.79339e-05 min. rot. difference after solving 0 max. rot. difference after solving 0.000261335 elapsed time 199.14 estimate of average time per invposkin (ms)0.19914 estimate of longest time per invposkin (ms) 5.98245 estimate of shortest time per invposkin (ms) 0.155544
Definition in file chainiksolverpos_lma_demo.cpp.
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 170 of file chainiksolverpos_lma_demo.cpp.
| void test_inverseposkin | ( | KDL::Chain & | chain | ) |
tests the inverse kinematics on the given kinematic chain for a large number of times and provides statistics on the result. provide other examples.
Definition at line 64 of file chainiksolverpos_lma_demo.cpp.