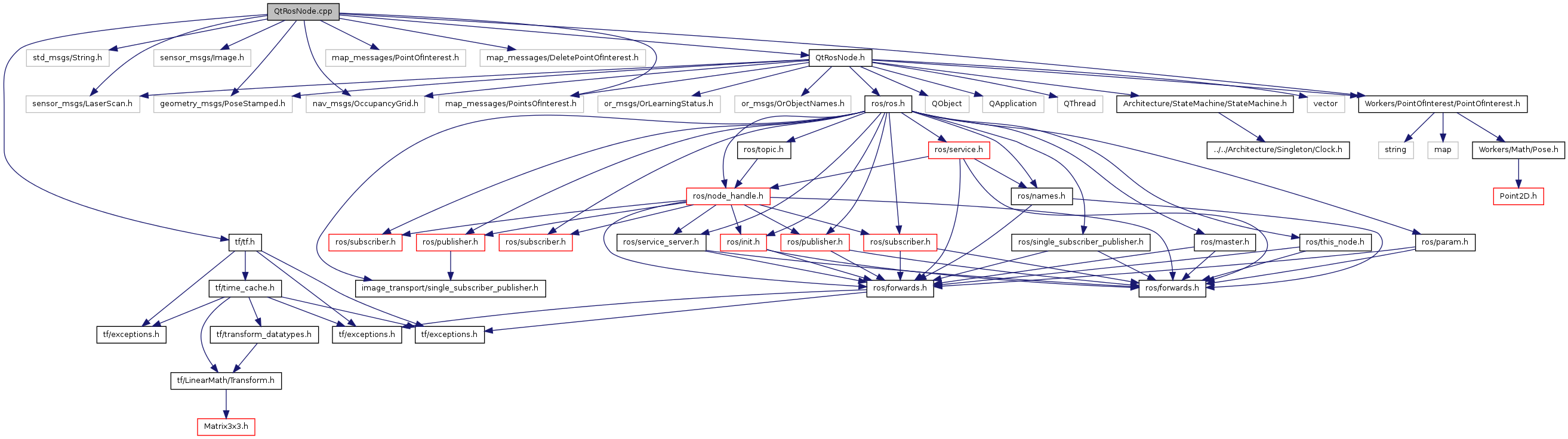
#include <tf/tf.h>#include <std_msgs/String.h>#include <sensor_msgs/LaserScan.h>#include <sensor_msgs/Image.h>#include <geometry_msgs/PoseStamped.h>#include <nav_msgs/OccupancyGrid.h>#include <map_messages/PointOfInterest.h>#include <map_messages/DeletePointOfInterest.h>#include <map_messages/PointsOfInterest.h>#include "QtRosNode.h"#include "Workers/PointOfInterest/PointOfInterest.h"
Include dependency graph for QtRosNode.cpp: