#include "ros/ros.h"#include "std_msgs/String.h"#include "nav_msgs/OccupancyGrid.h"#include "mapstitch/mapstitch.h"#include <tf/transform_broadcaster.h>#include <opencv/highgui.h>#include <unistd.h>#include <string>
Include dependency graph for rosmain.cpp:
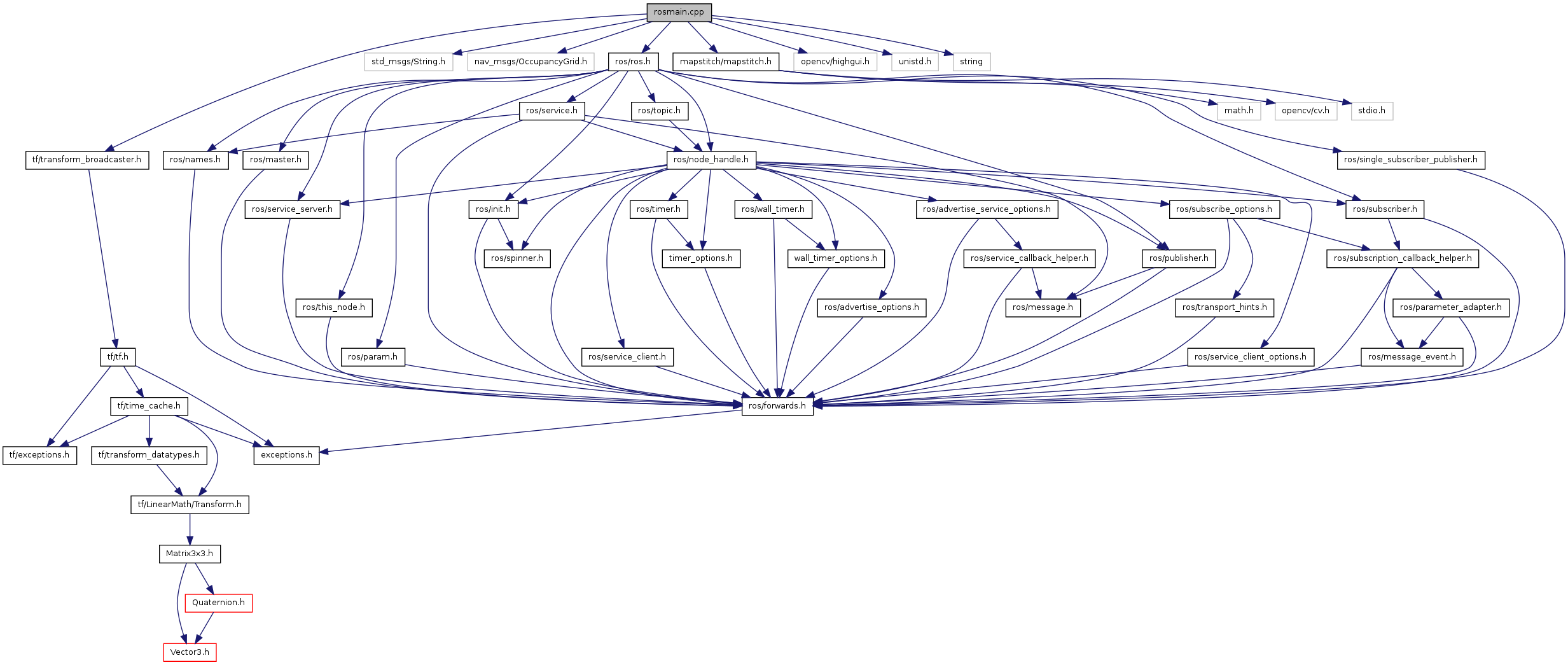
Go to the source code of this file.
Classes | |
| struct | stitch_maps |
Functions | |
| void | alignCallback (const nav_msgs::OccupancyGrid &new_map) |
| int | main (int argc, char **argv) |
| void | mapCallback (const nav_msgs::OccupancyGrid &new_map) |
| void | publish_stitch () |
| std::string | save_stitch ("") |
| Mat | toMat (const nav_msgs::OccupancyGrid *map) |
| void | update_stitch (struct stitch_maps *old_map, const nav_msgs::OccupancyGrid &new_map) |
| void | update_tf (struct stitch_maps *w, struct stitch_maps *m) |
| void | worldCallback (const nav_msgs::OccupancyGrid &new_world) |
Variables | |
| bool | debug = false |
| double | max_distance = 5. |
| struct stitch_maps | old_map |
| struct stitch_maps | old_world |
| Transform | ourtf |
| bool | tf_valid = false |
Function Documentation
| void alignCallback | ( | const nav_msgs::OccupancyGrid & | new_map | ) |
Definition at line 189 of file rosmain.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 196 of file rosmain.cpp.
| void mapCallback | ( | const nav_msgs::OccupancyGrid & | new_map | ) |
Definition at line 184 of file rosmain.cpp.
| void publish_stitch | ( | ) |
Definition at line 80 of file rosmain.cpp.
| std::string save_stitch | ( | "" | ) |
| Mat toMat | ( | const nav_msgs::OccupancyGrid * | map | ) |
Definition at line 54 of file rosmain.cpp.
| void update_stitch | ( | struct stitch_maps * | old_map, |
| const nav_msgs::OccupancyGrid & | new_map | ||
| ) |
Definition at line 162 of file rosmain.cpp.
| void update_tf | ( | struct stitch_maps * | w, |
| struct stitch_maps * | m | ||
| ) |
Definition at line 89 of file rosmain.cpp.
| void worldCallback | ( | const nav_msgs::OccupancyGrid & | new_world | ) |
Definition at line 177 of file rosmain.cpp.
Variable Documentation
| bool debug = false |
Definition at line 41 of file rosmain.cpp.
| double max_distance = 5. |
Definition at line 40 of file rosmain.cpp.
| struct stitch_maps old_map |
| struct stitch_maps old_world |
Definition at line 51 of file rosmain.cpp.
| bool tf_valid = false |
Definition at line 52 of file rosmain.cpp.