Delta torque (linearized dynamics). More...
#include "robot.h"
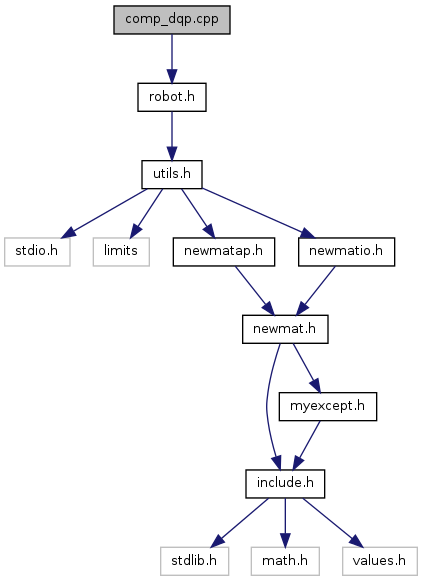
Include dependency graph for comp_dqp.cpp:
Go to the source code of this file.
Variables | |
| static const char | rcsid [] = "$Id: comp_dqp.cpp,v 1.16 2004/07/06 02:16:36 gourdeau Exp $" |
| RCS/CVS version. | |
Detailed Description
Delta torque (linearized dynamics).
Definition in file comp_dqp.cpp.
Variable Documentation
const char rcsid[] = "$Id: comp_dqp.cpp,v 1.16 2004/07/06 02:16:36 gourdeau Exp $" [static] |
RCS/CVS version.
Definition at line 54 of file comp_dqp.cpp.