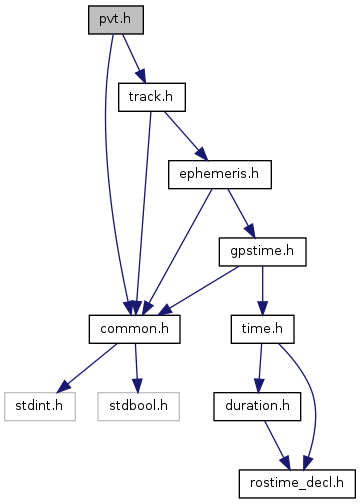
#include "common.h"
#include "track.h"
Go to the source code of this file.
Define Documentation
| #define D2R (GPS_PI/180.0) /* Degrees to radians. */ |
Definition at line 31 of file pvt.h.
Definition at line 33 of file pvt.h.
Definition at line 34 of file pvt.h.
Definition at line 24 of file pvt.h.
- Todo:
- These constants don't belong in this file.
Definition at line 22 of file pvt.h.
| #define GPS_PI 3.14159265358979323846 |
Definition at line 23 of file pvt.h.
| #define NAV_C 299792458.0 |
Definition at line 27 of file pvt.h.
| #define NAV_F -4.442807633e-010 |
Definition at line 28 of file pvt.h.
Definition at line 26 of file pvt.h.
Definition at line 25 of file pvt.h.
| #define NOMINAL_RANGE 22980E3 /* Average distance to satellite, meters. */ |
Definition at line 29 of file pvt.h.
Definition at line 36 of file pvt.h.
| #define R2D (180.0/GPS_PI) /* Radians to degrees. */ |
Definition at line 30 of file pvt.h.
Function Documentation
Receiver position latitude [deg], longitude [deg], altitude [m]
Receiver position ECEF XYZ [m]
Receiver velocity in NED [m/s]
Receiver velocity in ECEF XYZ [m/s]
Definition at line 46 of file pvt.h.
Variable Documentation
Definition at line 83 of file pvt.h.