#include <ros/ros.h>#include <geometry_msgs/PoseStamped.h>#include <geometry_msgs/Pose.h>#include <geometry_msgs/Pose2D.h>#include <angles/angles.h>#include <tf/tf.h>#include <tf/transform_listener.h>#include <tf/transform_datatypes.h>#include <costmap_2d/costmap_2d_ros.h>
Include dependency graph for conversions_and_types.h:

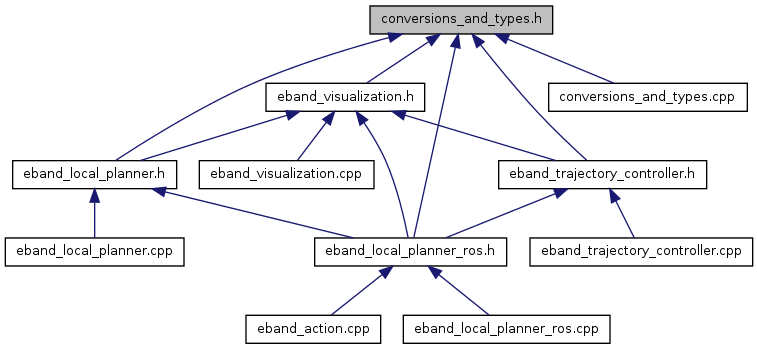
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | eband_local_planner::Bubble |
| < More... | |
Namespaces | |
| namespace | eband_local_planner |
Enumerations | |
| enum | eband_local_planner::AddAtPosition { eband_local_planner::add_front, eband_local_planner::add_back } |
Functions | |
| void | eband_local_planner::Pose2DToPose (geometry_msgs::Pose &pose, const geometry_msgs::Pose2D pose2D) |
| Converts a frame of type Pose to type Pose2D (mainly -> conversion of orientation from euler angles to quaternions, -> z-coordinate is set to zero) | |
| void | eband_local_planner::PoseToPose2D (const geometry_msgs::Pose pose, geometry_msgs::Pose2D &pose2D) |
| Converts a frame of type Pose to type Pose2D (mainly -> conversion of orientation from quaternions to euler angles) | |
| bool | eband_local_planner::transformGlobalPlan (const tf::TransformListener &tf, const std::vector< geometry_msgs::PoseStamped > &global_plan, const costmap_2d::Costmap2DROS &costmap, const std::string &global_frame, std::vector< geometry_msgs::PoseStamped > &transformed_plan, std::vector< int > &start_end_counts_from_end) |
| Transforms the global plan of the robot from the planner frame to the local frame. This replaces the transformGlobalPlan as defined in the base_local_planner/goal_functions.h main difference is that it additionally outputs counter indicating which part of the plan has been transformed. | |