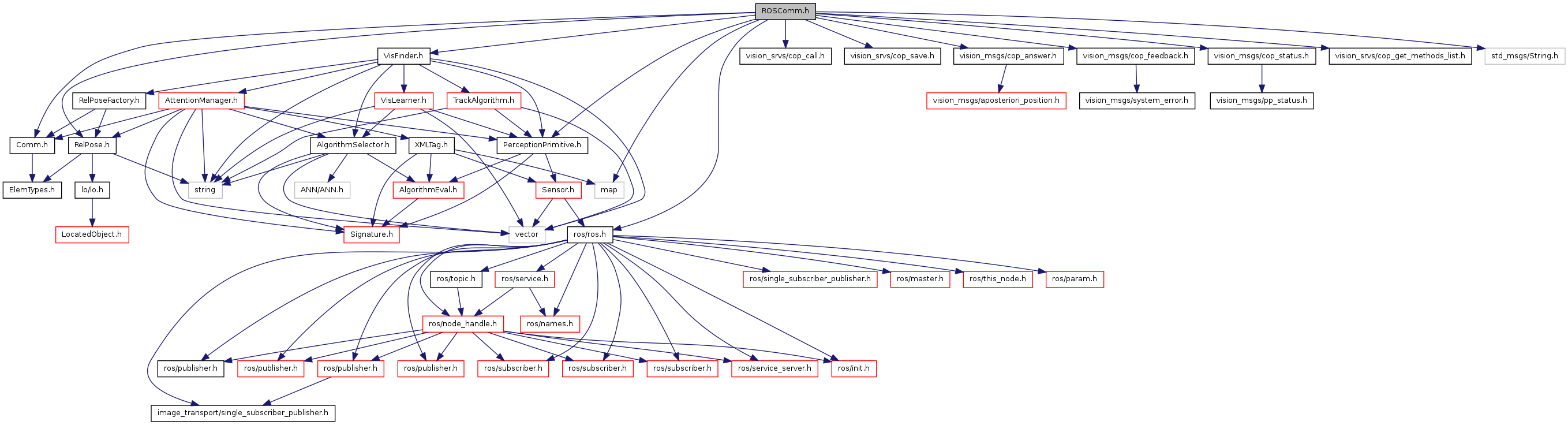
#include "RelPose.h"#include "VisFinder.h"#include "PerceptionPrimitive.h"#include "Comm.h"#include <map>#include <vision_srvs/cop_call.h>#include <vision_srvs/cop_save.h>#include <vision_msgs/cop_answer.h>#include <vision_msgs/cop_feedback.h>#include <vision_msgs/cop_status.h>#include <vision_srvs/cop_get_methods_list.h>#include <std_msgs/String.h>#include <ros/ros.h>
Include dependency graph for ROSComm.h:
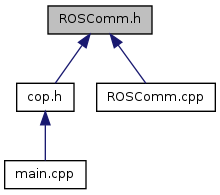
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | cop::ROSComm |
| class | cop::ROSTopicManager |
Namespaces | |
| namespace | cop |
all functionality of the project cognitive perception is in the cop namespace Have a closer look to the interfaces that are provided by cognitive_perception: | |
Defines | |
| #define | STD_COP_OUTPUT_PORT "/tracking/out" |
Define Documentation
| #define STD_COP_OUTPUT_PORT "/tracking/out" |